Blog-Thema: Janine Iten
svenweber | 1. Dezember 2010 | Categories: Allgemein, Cédric Steiner, Janine Iten, Pixel-Worm, Sibylle Oeschger, Sven Weber |
Aufgabenstellung Konstruiert ein “Wesen”, dieses soll: Eine “Persönlichkeit” besitzen seine Umgebung wahrnehmen mit der Umgebung interagieren können ja/ nein sagen können sowie einen Wach- und Schlafzustand haben. Entwickelt eine Geschichte/ einen Kontext in dem das Wesen eingebettet ist Making of Video Persönlichkeit Unser Pixel-Wurm, wird aus der Geschichte unten klar. Umgebungswahrnehmung PIXEL-WORM nimmt seine Umwelt…
janineiten | 18. November 2010 | Categories: Janine Iten |
Asychron (RS232) Muss nur empfangen und nichts liefern Gibt Konvention wie schnell Daten gesendet werden (Übertragungsrate) Beide sind am Hören und am Senden, die Sendung kann irgendwann passieren. ca. 320’000 pro Sekunde Baugruppen werden angesprochen, wie LCD Anzeige oder Servocontroller (Geräte mit Stecker sind immer Asychron) Synchron (SPI) Mit Clock werden die Signale aufeinander abgestimt…
janineiten | 17. November 2010 | Categories: Janine Iten |
Server: – Vor dem Lichtsensor befindet sich ein 100K Widerstand – Vor den Knöpfen befinden sich 10K Widerstände Client: Sourcecode für Prozessing für SERVER Sourcecode für Prozessing für CLIENT Sourcecode für Anduino: StandardFirmata (Unter Exemples)
janineiten | 12. November 2010 | Categories: Janine Iten |

Die Aufgabe war, irgend ein Countdown zu erstellen. Er musste nichts mit Zeit zu tun haben. Wir entschlossen uns, ein Rad mit einem Farbverlauf von rot zu grün als Countdown zu erstellen. Als Antrieb wählten wir einen Servo. Um das ganze möglichst stabil zu bauen, gingen wir in die Werkstatt und erstellten aus Holz, Karton…
janineiten | 10. November 2010 | Categories: Janine Iten |
janineiten | | Categories: Janine Iten |
Der DC Motor wird mit einem Drucksensor gesteuert. Wird der Sensor fest gedrückt, wird der Motor langsamer und haltet sogar an. Beim Wiederloslassen ändert der Motor seine Laufrichtung.
janineiten | 5. November 2010 | Categories: Janine Iten |
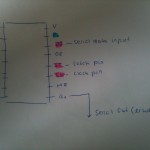
Shift Out funktioniert ähnlich wie ein Decoder. Ein Decoder hat 3 Eingänge (3 Bits), welche gleichzeitig in den 8 Outputs ausgegeben werden. Ein Shift out hat auch 3 Eingänge, aber mit anderen Funktionen dahinter. – Eingang 1: Data Input (liefert ein ganzes Byte) – Eingang 2: Latch Pin (0 oder 1, 0 = Chip deaktiviert,…
janineiten | 4. November 2010 | Categories: Janine Iten |

LED Ja / Nein / Schlafen Ja = langsames an und ab dimmen (mit einfacher IF-Abfrage) Nein = hektisches an und ab dimmen (mit Einsatz von der Sinus Logik) Schlafschtand = LED brennt nur ein bisschen Schieber Film ansehen
janineiten | 3. November 2010 | Categories: Janine Iten |

Analoge Inputs Widerstand: 18, 4 k Ohm Widerstand 2k Ohm Code: int zahl1; int zahl2; int zahl3; int zaehler = 0; int durchschnitt; void setup() { Serial.begin(9600); } void loop() { if (zaehler == 0){ zahl1 = analogRead(4); } else if (zaehler == 1){ zahl2 = analogRead(4); } else if (zaehler == 2){ zahl3 =…
janineiten | 2. November 2010 | Categories: Janine Iten |

DECODER Pins definieren auf dem Arduino Board als OUTPUTS(!!) C -> Pin 8 B -> Pin 9 A -> Pin 10 Wenn Pin 8, 9, und 10 alle auf 0 sind, dann soll Y0 = Low sein (also nicht leuchten) Da die Schlaufe 8x durchgeht, wird jedes Lämpchen als H oder L definiert.