März 1, 2012
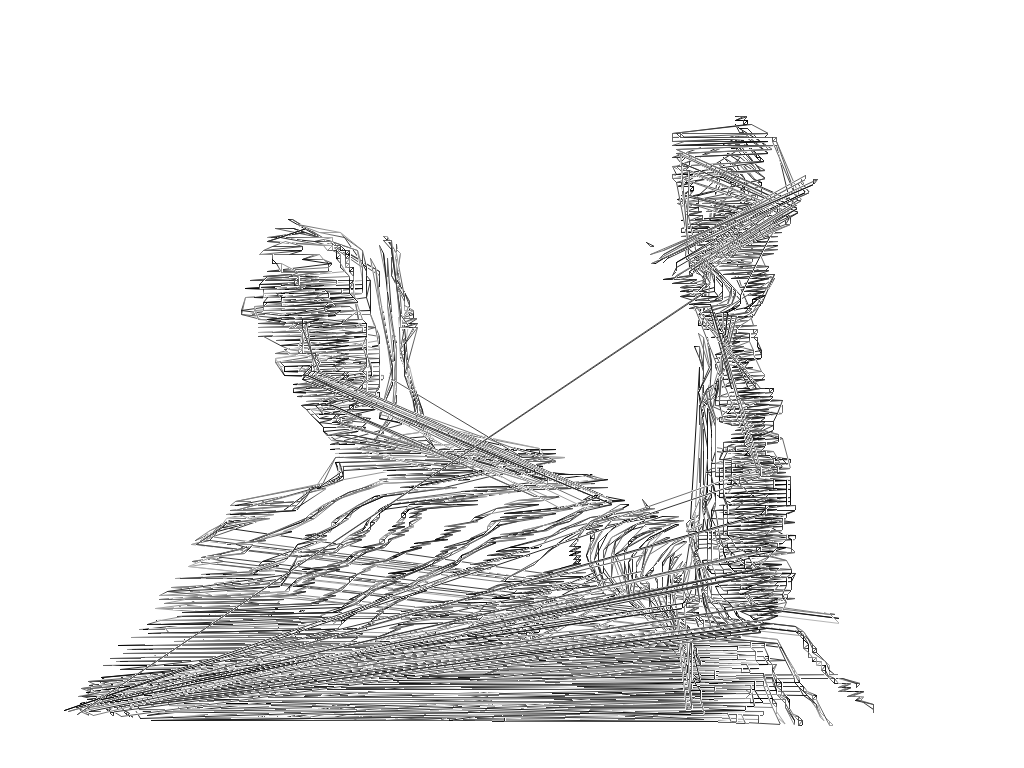 Die Tiefeninformationen der Kinect werden verwendet um einzelnen Tiefenflächen zu zeichnen.
Die Tiefeninformationen der Kinect werden verwendet um einzelnen Tiefenflächen zu zeichnen.
/* --------------------------------------------------------------------------
* SimpleOpenNI DepthMap3d Test
* --------------------------------------------------------------------------
* Processing Wrapper for the OpenNI/Kinect library
* http://code.google.com/p/simple-openni
* --------------------------------------------------------------------------
* prog: Max Rheiner / Interaction Design / zhdk / http://iad.zhdk.ch/
* date: 02/16/2011 (m/d/y)
* ----------------------------------------------------------------------------
*/
import SimpleOpenNI.*;
int linesFrom = 200;
int linesTill = 1000;
int steps = 400;
ArrayList[] points;
SimpleOpenNI context;
float zoomF =0.6f;
float rotX = radians(180); // by default rotate the hole scene 180deg around the x-axis,
// the data from openni comes upside down
float rotY = radians(0);
void setup()
{
frameRate(300);
size(1024, 768, P3D); // strange, get drawing error in the cameraFrustum if i use P3D, in opengl there is no problem
//context = new SimpleOpenNI(this,SimpleOpenNI.RUN_MODE_SINGLE_THREADED);
context = new SimpleOpenNI(this);
// disable mirror
context.setMirror(false);
// enable depthMap generation
if (context.enableDepth() == false)
{
println("Can't open the depthMap, maybe the camera is not connected!");
exit();
return;
}
stroke(0);
noFill();
smooth();
perspective(radians(45),
float(width)/float(height),
10, 150000);
}
void draw()
{
// update the cam
context.update();
ArrayList[] points = new ArrayList[int(linesTill-linesFrom/steps)];
for(int i = 0;i<points.length;i++){
points[i] = new ArrayList();
}
background(255);
translate(width/2, height/2, 0);
rotateX(rotX);
rotateY(rotY);
scale(zoomF);
int[] depthMap = context.depthMap();
int steps = 3; // to speed up the drawing, draw every third point
int index;
PVector realWorldPoint;
translate(0, 0, -1000); // set the rotation center of the scene 1000 infront of the camera
//stroke(0);
PVector[] realWorldMap = context.depthMapRealWorld();
for (int y=0;y < context.depthHeight();y+=steps)
{
for (int x=0;x = linesFrom && depthMap[index] < linesTill )
{
realWorldPoint = realWorldMap[index];
int index2 = depthMap[index] - linesFrom;
if(index2 % steps == 0) {
points[index2].add(new PVector(realWorldPoint.x, realWorldPoint.y, realWorldPoint.z));
}
//point(realWorldPoint.x, realWorldPoint.y, realWorldPoint.z); // make realworld z negative, in the 3d drawing coordsystem +z points in the direction of the eye
}
}
}
noFill();
for(int i = 0;i<points.length;i++){
beginShape(TRIANGLE_STRIP);
for(int j = 0;j<points[i].size();j++){
stroke(map(i,0,points.length,0,random(255)));
PVector p = (PVector) points[i].get(j);
vertex(p.x,p.y,p.z);
}
endShape();
}
// draw the kinect cam
//context.drawCamFrustum();
}
void keyPressed()
{
switch(key)
{
case ' ':
context.setMirror(!context.mirror());
break;
}
switch(keyCode)
{
case LEFT:
rotY += 0.1f;
break;
case RIGHT:
// zoom out
rotY -= 0.1f;
break;
case UP:
if (keyEvent.isShiftDown())
zoomF += 0.02f;
else
rotX += 0.1f;
break;
case DOWN:
if (keyEvent.isShiftDown())
{
zoomF -= 0.02f;
if (zoomF < 0.01)
zoomF = 0.01;
}
else
rotX -= 0.1f;
break;
case ENTER:
saveFrame("######.png");
break;
}
}