März 4, 2012
Processing
Main
import SimpleOpenNI.*;
Hashtable users = new Hashtable();
SimpleOpenNI context;
float zoomF =0.3f;
float rotX = radians(160); // by default rotate the hole scene 180deg around the x-axis,
// the data from openni comes upside down
float rotY = radians(12);
boolean autoCalib=true;
float bgLimitDepth=3000;
Hashtable userColor = new Hashtable();
Hashtable userBalls = new Hashtable();
Hashtable userTarget = new Hashtable();
PVector boxForce = new PVector();
PVector lineDir = new PVector();
Hashtable lineForce = new Hashtable();
boolean recording=false;
void setup()
{
size(1024,768,P3D); // strange, get drawing error in the cameraFrustum if i use P3D, in opengl there is no problem
context = new SimpleOpenNI(this);
// play recording
context.openFileRecording("limbpong_double.oni");
// enable mirror
context.setMirror(true);
// enable depthMap generation
if(context.enableDepth() == false)
{
println("Can't open the depthMap, maybe the camera is not connected!");
exit();
return;
}
// enable skeleton generation for all joints
context.enableUser(SimpleOpenNI.SKEL_PROFILE_UPPER);
stroke(255,255,255);
smooth();
perspective(radians(45),
float(width)/float(height),
10,150000);
// setup the recording
if (recording==true) {
context.enableRecorder(SimpleOpenNI.RECORD_MEDIUM_FILE, "limbpong_double.oni");
// select the recording channels
context.addNodeToRecording(SimpleOpenNI.NODE_DEPTH,
SimpleOpenNI.CODEC_16Z_EMB_TABLES);
context.addNodeToRecording(SimpleOpenNI.NODE_IMAGE,
SimpleOpenNI.CODEC_JPEG);
}
}
void draw()
{
// update the cam
context.update();
background(255);
// set the scene pos
translate(width/2, height/2, 0);
rotateX(rotX);
rotateY(rotY);
scale(zoomF);
PImage rgbImage = context.rgbImage();
int[] depthMap = context.depthMap();
int steps = 4; // to speed up the drawing, draw every third point
int index;
PVector realWorldPoint;
color pixelColor;
translate(0,0,-1000); // set the rotation center of the scene 1000 infront of the camera
//int userCount = context.getNumberOfUsers();
//context.alternativeViewPointDepthToImage();
stroke(153);
strokeWeight(2);
for(int y=0;y < context.depthHeight();y+=steps)
{
for(int x=0;x < context.depthWidth();x+=steps)
{
index = x + y * context.depthWidth();
if(depthMap[index] > 0 && depthMap[index]<bgLimitDepth)
{
// draw the projected point
realWorldPoint = context.depthMapRealWorld()[index];
point(realWorldPoint.x,realWorldPoint.y,realWorldPoint.z);
}
}
}
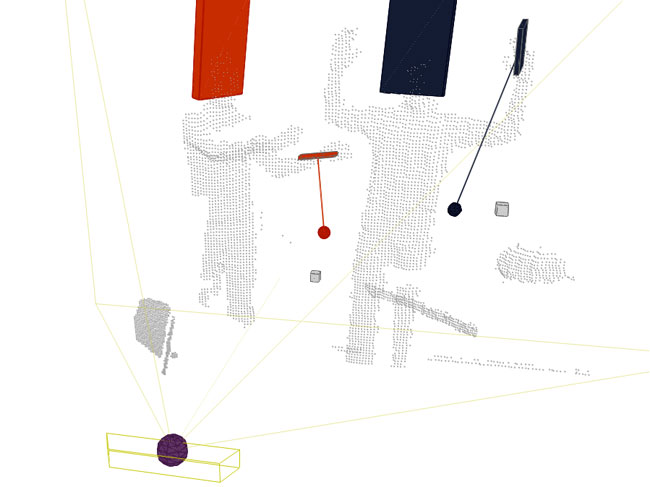
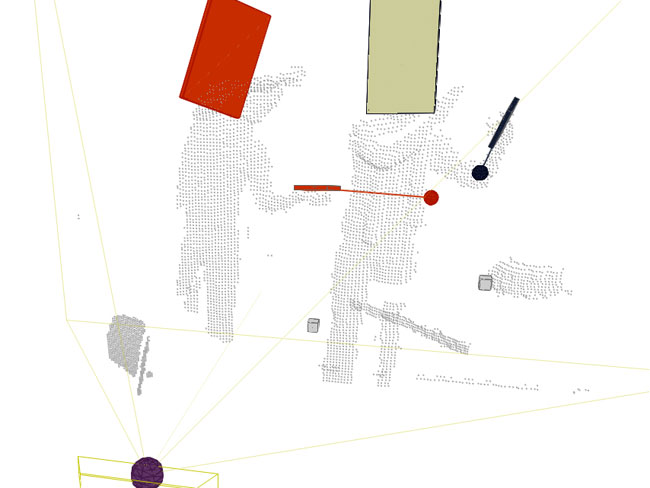
// loop through users (update ball, target)
ArrayList tmpUsers = new ArrayList();
ArrayList tmpBalls = new ArrayList();
for (Enumeration e = users.keys() ; e.hasMoreElements() 😉 {
int user = (Integer) e.nextElement();
Ball userBall = (Ball) userBalls.get(user);
userBall.draw();
tmpUsers.add(user);
tmpBalls.add(userBall.boxPos);
Target userT = (Target) userTarget.get(user);
if (user==userT.parent) {
userT.draw();
}
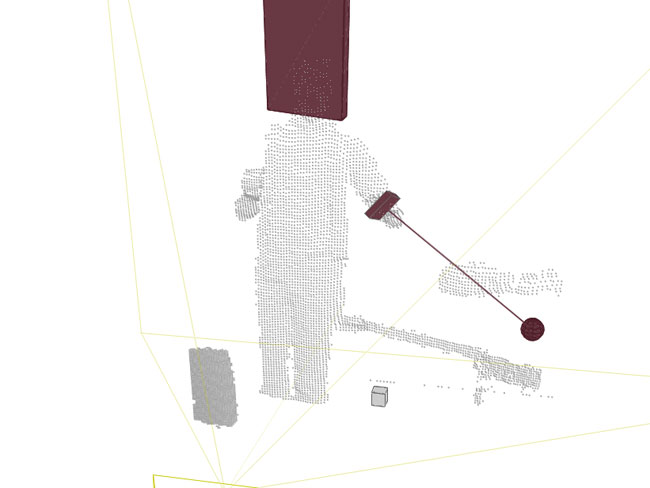
// draw the skeleton if it's available
if(context.isTrackingSkeleton(user)) drawSkeleton(user);
}
// COLLISION
for(int i=0; i<tmpUsers.size(); i++) {
for(int i2=0; i2<tmpUsers.size(); i2++) {
if ((Integer) tmpUsers.get(i2)!=(Integer) tmpUsers.get(i)) {
Target userT = (Target) userTarget.get(tmpUsers.get(i2));
for(int k=0; k<tmpBalls.size(); k++) {
userT.checkCollision((PVector) tmpBalls.get(i),(Integer)tmpUsers.get(i));
}
}
}
}
// draw the kinect cam
context.drawCamFrustum();
}
// draw the skeleton with the selected joints
void drawSkeleton(int userId)
{
strokeWeight(3);
// to get the 3d joint data
drawLimb(userId, SimpleOpenNI.SKEL_HEAD, SimpleOpenNI.SKEL_NECK, false);
drawLimb(userId, SimpleOpenNI.SKEL_NECK, SimpleOpenNI.SKEL_LEFT_SHOULDER, false);
drawLimb(userId, SimpleOpenNI.SKEL_LEFT_SHOULDER, SimpleOpenNI.SKEL_LEFT_ELBOW, false);
drawLimb(userId, SimpleOpenNI.SKEL_LEFT_ELBOW, SimpleOpenNI.SKEL_LEFT_HAND, false);
drawLimb(userId, SimpleOpenNI.SKEL_NECK, SimpleOpenNI.SKEL_RIGHT_SHOULDER, false);
drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_SHOULDER, SimpleOpenNI.SKEL_RIGHT_ELBOW, false);
drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_ELBOW, SimpleOpenNI.SKEL_RIGHT_HAND, true);
drawLimb(userId, SimpleOpenNI.SKEL_LEFT_SHOULDER, SimpleOpenNI.SKEL_TORSO, false);
drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_SHOULDER, SimpleOpenNI.SKEL_TORSO, false);
//drawLimb(userId, SimpleOpenNI.SKEL_TORSO, SimpleOpenNI.SKEL_LEFT_HIP);
//drawLimb(userId, SimpleOpenNI.SKEL_LEFT_HIP, SimpleOpenNI.SKEL_LEFT_KNEE);
//drawLimb(userId, SimpleOpenNI.SKEL_LEFT_KNEE, SimpleOpenNI.SKEL_LEFT_FOOT);
//drawLimb(userId, SimpleOpenNI.SKEL_TORSO, SimpleOpenNI.SKEL_RIGHT_HIP);
//drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_HIP, SimpleOpenNI.SKEL_RIGHT_KNEE);
//drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_KNEE, SimpleOpenNI.SKEL_RIGHT_FOOT);
strokeWeight(1);
}
void drawLimb(int userId,int jointType1,int jointType2, boolean drawBox)
{
PVector jointPos1 = new PVector();
PVector jointPos2 = new PVector();
float confidence;
// draw the joint position
confidence = context.getJointPositionSkeleton(userId,jointType1,jointPos1);
confidence = context.getJointPositionSkeleton(userId,jointType2,jointPos2);
stroke(255,0,0,confidence * 200 + 55);
//line(jointPos1.x,jointPos1.y,jointPos1.z,
// jointPos2.x,jointPos2.y,jointPos2.z);
float limbLength = dist(jointPos1.x,jointPos1.y,jointPos1.z,jointPos2.x,jointPos2.y,jointPos2.z);
PVector pVdir = jointPos1.cross(jointPos2); // direction of limb
drawJointOrientation(userId,jointType1,jointPos1,jointType2,jointPos2,50,drawBox, limbLength, pVdir);
}
void drawJointOrientation(int userId,int jointType,PVector pos,int jointType2,PVector pos2,float length, boolean drawBox, float limbLength, PVector pVdir)
{
// draw the joint orientation
PMatrix3D orientation = new PMatrix3D();
float confidence = context.getJointOrientationSkeleton(userId,jointType,orientation);
if(confidence < 0.001f)
// nothing to draw, orientation data is useless
return;
Ball userBall = (Ball) userBalls.get(userId);
// target
Target userT = (Target) userTarget.get(userId);
// skeleton head -> draw target
if (jointType==SimpleOpenNI.SKEL_NECK) {
userT.ini = false;
userT.targetPos = pos;
userT.orientation = orientation;
}
if (drawBox==true) {
color uColor = (Integer) userColor.get(userId);
float offsetDefaultY = -700;
strokeWeight(1);
pushStyle();
stroke(red(uColor),green(uColor),blue(uColor));
strokeWeight(2);
// line target to hand
line(userBall.boxPos.x,userBall.boxPos.y,userBall.boxPos.z,
pos2.x,pos2.y,pos2.z);
popStyle();
PVector targetPos = new PVector(userBall.boxPos.x,userBall.boxPos.y,userBall.boxPos.z);
PVector lineDir = PVector.sub(pos2,targetPos);
// default position
//line(userBall.boxPos.x,userBall.boxPos.y,userBall.boxPos.z,pos2.x,pos2.y+offsetDefaultY,pos2.z);
pushMatrix();
translate(pos2.x,pos2.y+offsetDefaultY,pos2.z);
fill(204);
stroke(102);
box(50,50,50);
popMatrix();
PVector defaultPos = new PVector(pos2.x,pos2.y-700,pos2.z);
PVector defaultDir = PVector.sub(defaultPos,targetPos);
boxForce.add(defaultDir);
boxForce.add(lineDir);
boxForce.normalize();
boxForce.mult(180);
userBall.boxDir.add(boxForce);
// box hand
pushMatrix();
translate(pos2.x,pos2.y,pos2.z);
// set the local coordsys
applyMatrix(orientation);
if (pVdir.z>0) {
//translate(limbLength,0,0);
} else {
// translate(-limbLength,0,0);
}
fill(red(uColor),green(uColor),blue(uColor));
box(200,100,20);
// coordsys lines are 100mm long
// x - r
//stroke(255,0,0,confidence * 200 + 55);
//line(0,0,0,
// length,0,0);
// y - g
//stroke(0,255,0,confidence * 200 + 55);
//line(0,0,0,
// 0,length,0);
// z - b
//stroke(0,0,255,confidence * 200 + 55);
//line(0,0,0,
// 0,0,length);
popMatrix();
}
}
// -----------------------------------------------------------------
// SimpleOpenNI user events
void onNewUser(int userId)
{
users.put(userId, userId);
userColor.put(userId, color(random(0,204),random(0,204),random(0,204)));
color tmpC = (Integer) userColor.get(userId);
// BALL ini
Ball tmp = new Ball(tmpC);
userBalls.put(userId, tmp);
Target userT = new Target(userId);
userT.userColor = tmpC;
userTarget.put(userId,userT);
println("onNewUser - userId: " + userId);
println(" start pose detection");
if(autoCalib)
context.requestCalibrationSkeleton(userId,true);
else
context.startPoseDetection("Psi",userId);
}
void onLostUser(int userId)
{
println("onLostUser - userId: " + userId);
users.remove(userId);
userBalls.remove(userId);
}
void onStartCalibration(int userId)
{
println("onStartCalibration - userId: " + userId);
}
void onEndCalibration(int userId, boolean successfull)
{
println("onEndCalibration - userId: " + userId + ", successfull: " + successfull);
if (successfull)
{
println(" User calibrated !!!");
context.startTrackingSkeleton(userId);
}
else
{
println(" Failed to calibrate user !!!");
println(" Start pose detection");
context.startPoseDetection("Psi",userId);
}
}
void onStartPose(String pose,int userId)
{
println("onStartdPose - userId: " + userId + ", pose: " + pose);
println(" stop pose detection");
context.stopPoseDetection(userId);
context.requestCalibrationSkeleton(userId, true);
}
void onEndPose(String pose,int userId)
{
println("onEndPose - userId: " + userId + ", pose: " + pose);
}
// -----------------------------------------------------------------
// Keyboard events
void keyPressed()
{
switch(key)
{
case ' ':
context.setMirror(!context.mirror());
break;
case 'p':
save("screens/points_"+year()+"-"+month()+"-"+day()+"_"+hour()+"-"+minute()+"-"+second());
break;
}
switch(keyCode)
{
case LEFT:
rotY += 0.1f;
break;
case RIGHT:
// zoom out
rotY -= 0.1f;
break;
case UP:
if(keyEvent.isShiftDown())
zoomF += 0.01f;
else
rotX += 0.1f;
break;
case DOWN:
if(keyEvent.isShiftDown())
{
zoomF -= 0.01f;
if(zoomF < 0.01)
zoomF = 0.01;
}
else
rotX -= 0.1f;
break;
}
}
Class Ball
class Ball {
PVector boxPos = new PVector();
PVector boxDir = new PVector(0,0,0);
float ballRotX;
float ballRotY;
float gravity = 0;
float friction = 0.92;
color ballColor;
int ballSize = 30;
Ball(color _c) {
ballColor = _c;
}
void draw() {
boxDir.x*=friction;
boxDir.y*=friction;
boxDir.z*=friction;
boxPos.add(boxDir);
pushMatrix();
translate(boxPos.x,boxPos.y,boxPos.z);
//rotateX(radians(ballRotX));
//rotateY(radians(ballRotY));
fill(red(ballColor),green(ballColor),blue(ballColor));
stroke(red(ballColor)-24,green(ballColor)-24,blue(ballColor)-24);
sphereDetail(8);
sphere(ballSize);
popMatrix();
boxPos.y-=gravity;
//boxPos.y+=1;
}
}
Class Target
class Target {
boolean hit=false;
color targetColor = color(204,204,153);
PVector targetSize = new PVector(300,500,50);
PVector targetPos = new PVector(0,0,1000);
PVector shiftPos = new PVector(0,400,0);
PVector ballPos = new PVector(0,0,0);
color userColor = color(0,0,0);
int parent;
int xTarget,yTarget,zTarget;
PMatrix3D orientation = new PMatrix3D();
boolean ini=true;
float hitLength = 30;
float hitLengthCounter=0;
float hitArea=400;
Target(int _parent) {
parent = _parent;
}
void draw() {
if (parent>0 && ini==false) {
pushMatrix();
fill(userColor);
if ((hit==true || hitLengthCounter<hitLength) && ini==false) {
fill(targetColor);
}
targetPos.add(shiftPos);
translate(targetPos.x, targetPos.y, targetPos.z);
// set the local coordsys
applyMatrix(orientation);
box(targetSize.x,targetSize.y,targetSize.z);
popMatrix();
hit=false;
hitLengthCounter++;
}
}
boolean checkCollision(PVector _p,int user) {
ballPos = _p;
if (ini==false && parent != user ) {
//println("CHECK2");
if((int(ballPos.x) >= (targetPos.x-hitArea) && int(ballPos.x) <= (targetPos.x+hitArea + targetSize.x))
&& (int(ballPos.y) >= (targetPos.y-hitArea) && int(ballPos.y) <= (targetPos.y+hitArea + targetSize.y))
&& (int(ballPos.z) >= (targetPos.z-hitArea) && int(ballPos.z) <= (targetPos.z+hitArea + targetSize.z))
){
println("Kollision parent " + parent + " user " + user);
hit=true;
hitLengthCounter=0;
}
}
return hit;
}
}