16. Oktober 2012
Video
LostInSpac360
Ideenfindung
1. Fitness Uhr Eine sportliche Aktivität eines Users wird von einem Bewegunssensor erfasst und die relevante Daten an einer Armbanduhr angezeigt. Der Bewegungssensor wird davor an das Nutzer Objekt angebracht 1.Modus Digitalanzeige = Zählt die gewünschte Wiederholungsanzahl der Übung. 0 = Ende der Übung LED Ring = Wiederholungsfrequenz (Taktrate) der Übung 2.Modus Digitalanzeige = Abstrakte Streckendistanz. 0.0 = Ziel. LED Ring = Rückstand oder Vorsprung zum Mitstreiter.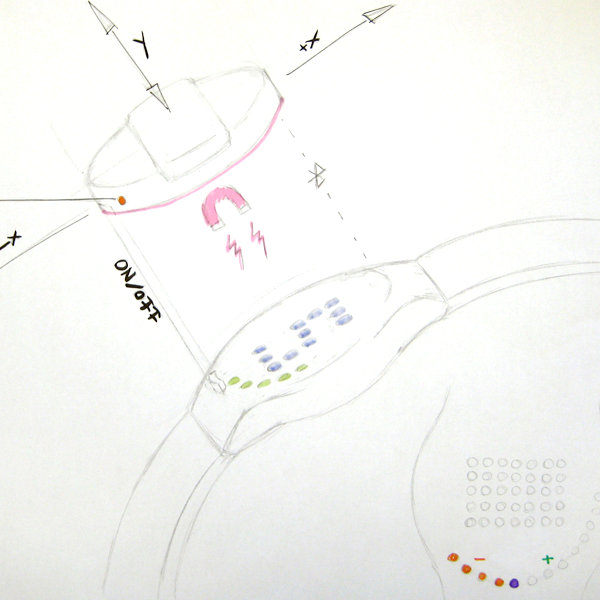 2. Wendeltreppen Lampe
Begleitet eine Person auf seinem Weg die Wendeltreppe hoch oder runter.
2. Wendeltreppen Lampe
Begleitet eine Person auf seinem Weg die Wendeltreppe hoch oder runter.
Konzept
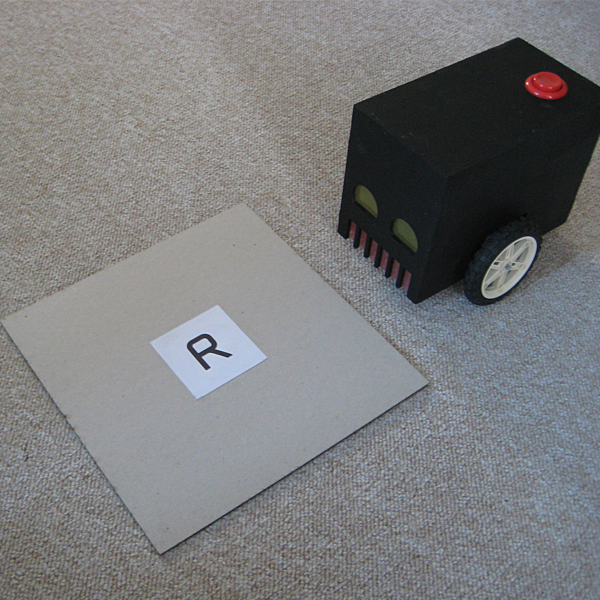
Lost in Space Hilf dem orientierungslosen Roboter „Roll E“ nach Hause zu finden.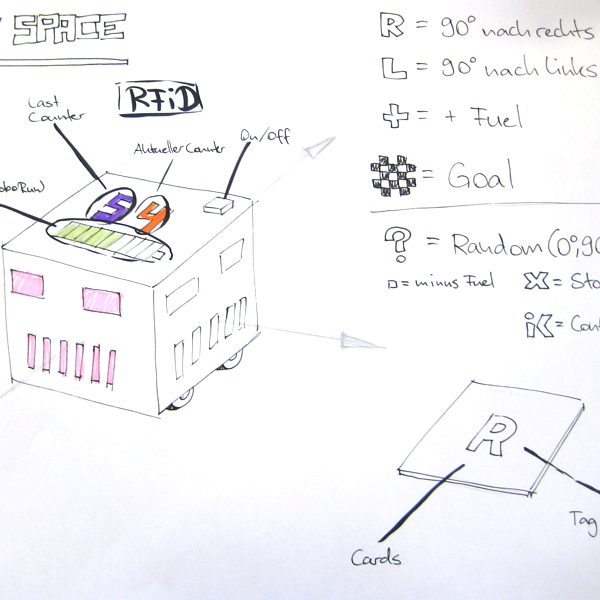
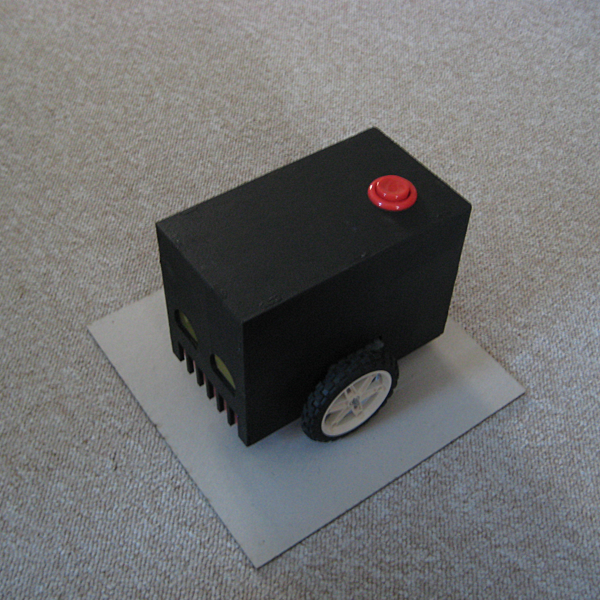
 Roboter
Ist Roll E erst einmal eingeschaltet, fährt dieser in Blickrichtung gerade aus. Sein Fahrverhalten kann nur über sogenannte CardTags beeinflusst werden. Roll E verfügt über einen am Unterboden eingebauten RFiD Reader (Leseeinheit), mit der er überfahrene TagCards auslesen und die entsprechenden Kommandos ausführen kann.
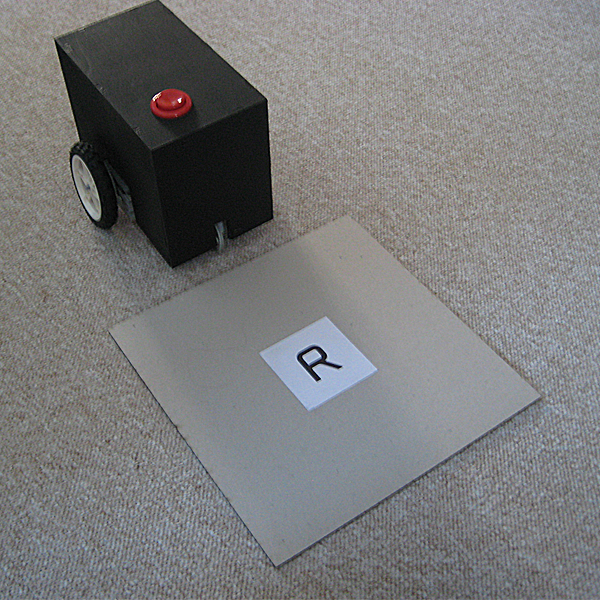
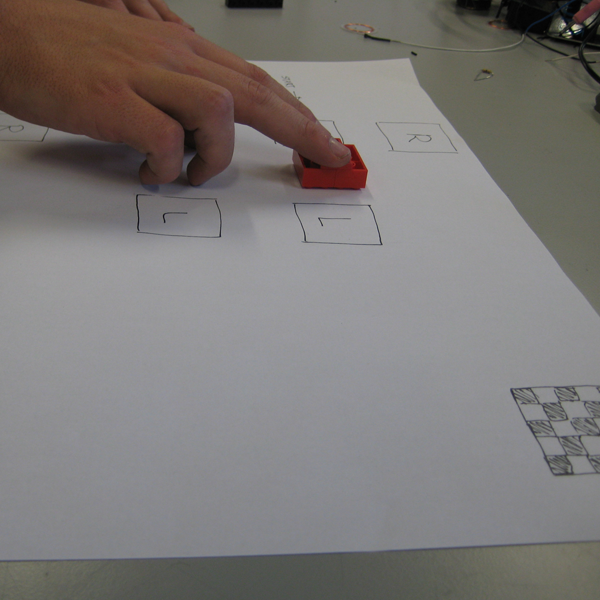
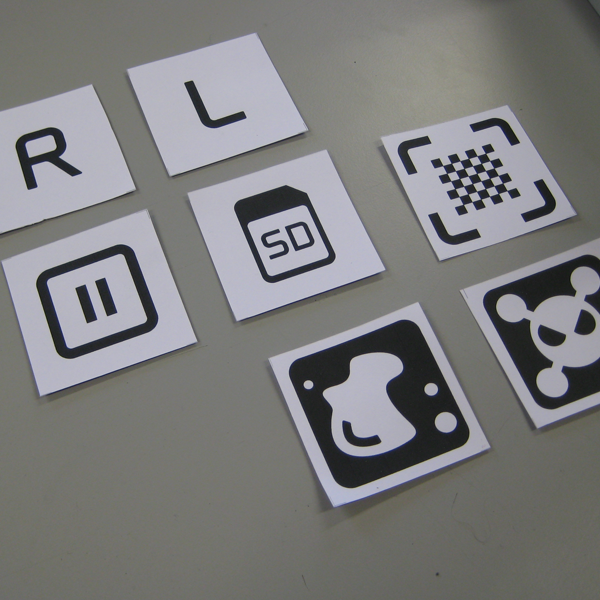
TagCards
Diese Spielkarten können frei auf der Bewegungsfläche von Roll E platziert werden.
Icons auf den Karten zeigen dem Nutzer die Funktion der einzelnen Karten. Im Zentrum einer jeder Karte ist jeweils ein RFiD Tag (Transponder) unterlegt.
Ziel
Erreiche mit Roll E die zu beginn gelegte HomeCard.
Must Have
Roll E
- Ein und aus Schalter
- Ungefähres, absehbares Fahrverhalten in 90° Winkeln
- Blickrichtung = Fahrtrichtung
- Funktionierender RFiD Reader
- Optisch ansprechend
CardTags
- Klare, unverwechselbare Icons
- Optisch ansprechend
- Right Card (Fahrtrichtungsänderung um 90° Uhrzeigersinn)
- Left Card (Fahrtrichtungsänderung um 90° Gegenuhrzeigersinn)
- HomeCard (Ziel des Roboters)
Nice to Have
Roll E
- Eingebauter Kartenzähler
- Energieanzeige (Treibstoff) die sich über die Zeit entleert
- Aufladetimer
CardTags
- BackCard (Fahrtrichtungsänderung um 180°)
- VirusCard (Nachfolgende Karte wird gegenteilig ausgelesen)
- OilCard(Fahrtrichtungsänderung um 0°, 90° Uhrzeigersinn, 90° Gegenuhrzeigersinn oder 180°)
- RepeatCard (Letzte Card Funktion wird wiederholt)
- PausCard (Roll E wird kurzzeitig gestoppt)
- Speed Card (Fahrtgeschwindigkeit erhöhen)
- Slow Card (Fahrtgeschwindigkeit verringern)
- Charging+ (Erhöht den Energiezustand)
- Charging- (Verringert den Energiezustand)
Roboter
Ist Roll E erst einmal eingeschaltet, fährt dieser in Blickrichtung gerade aus. Sein Fahrverhalten kann nur über sogenannte CardTags beeinflusst werden. Roll E verfügt über einen am Unterboden eingebauten RFiD Reader (Leseeinheit), mit der er überfahrene TagCards auslesen und die entsprechenden Kommandos ausführen kann.
TagCards
Diese Spielkarten können frei auf der Bewegungsfläche von Roll E platziert werden.
Icons auf den Karten zeigen dem Nutzer die Funktion der einzelnen Karten. Im Zentrum einer jeder Karte ist jeweils ein RFiD Tag (Transponder) unterlegt.
Ziel
Erreiche mit Roll E die zu beginn gelegte HomeCard.
Must Have
Roll E
- Ein und aus Schalter
- Ungefähres, absehbares Fahrverhalten in 90° Winkeln
- Blickrichtung = Fahrtrichtung
- Funktionierender RFiD Reader
- Optisch ansprechend
CardTags
- Klare, unverwechselbare Icons
- Optisch ansprechend
- Right Card (Fahrtrichtungsänderung um 90° Uhrzeigersinn)
- Left Card (Fahrtrichtungsänderung um 90° Gegenuhrzeigersinn)
- HomeCard (Ziel des Roboters)
Nice to Have
Roll E
- Eingebauter Kartenzähler
- Energieanzeige (Treibstoff) die sich über die Zeit entleert
- Aufladetimer
CardTags
- BackCard (Fahrtrichtungsänderung um 180°)
- VirusCard (Nachfolgende Karte wird gegenteilig ausgelesen)
- OilCard(Fahrtrichtungsänderung um 0°, 90° Uhrzeigersinn, 90° Gegenuhrzeigersinn oder 180°)
- RepeatCard (Letzte Card Funktion wird wiederholt)
- PausCard (Roll E wird kurzzeitig gestoppt)
- Speed Card (Fahrtgeschwindigkeit erhöhen)
- Slow Card (Fahrtgeschwindigkeit verringern)
- Charging+ (Erhöht den Energiezustand)
- Charging- (Verringert den Energiezustand)
Umsetzung
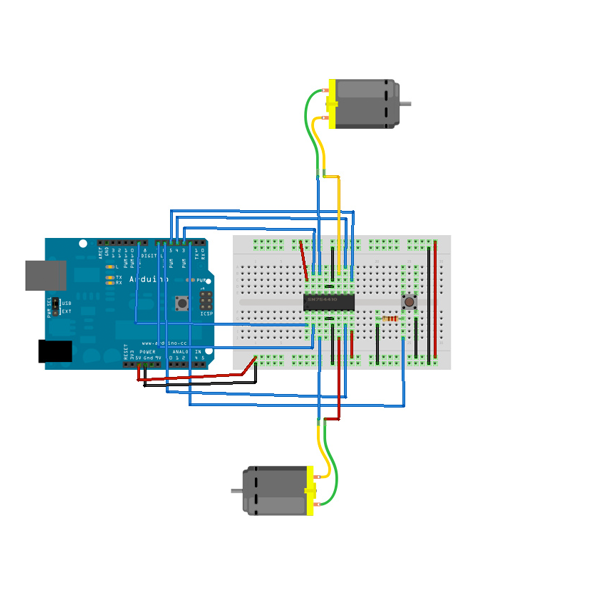
1. Antriebsmechanik aus Lego Technik Bauteilen und zwei 9Volt DC-Motoren. Verdrahtung der elektrischen Komponenten.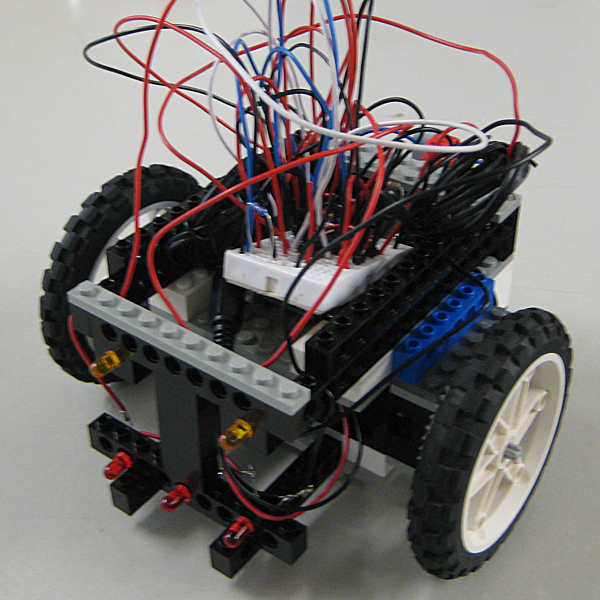
 2. Coding der verschiedenen Tag Funktionen in Arduino.
CODE:
2. Coding der verschiedenen Tag Funktionen in Arduino.
CODE:
#include
int RFIDResetPin = 13;
SoftwareSerial mySerial(2,3);
char lastTagCard[] = "BBBBBBBBBBBB";
//Gruppen zum Vergleichen
const int anzahlDerGruppen = 10;
const int anzahlDerEintraege = 4;
char* tagCards[anzahlDerGruppen][anzahlDerEintraege] ={
{
"35021E5DD8AC", "", "", "" } // TagCardHome
,
{
"84003399CFE1", "35021CF723FF", "08B0A4210D30", "89B0A4A15C60" } // TagCardR
,
{
"21A12600983E", "840033973111", "81B186A1C9DE", "29B1060020BE" } // TagCardL
,
{
"35021E7C0055", "", "", "" } // TagCardZ
,
{
"35021D1F0336", "", "", "" } // TagCardAusruhen
,
{
"35021EB149D1", "", "", "" } // TagCardSD
,
{
"35021D00163C", "", "", "" } // TagCardOelspur
,
{
"01B3A4A15DEA", "", "", "" } // TagCardVirus
,
{
"", "", "", "" } // TagCardSpeedPlus
,
{
"00B0A6A1C770", "", "", "" } // TagCardSpeedMinus
,
};
boolean tagCardHome = false;
boolean tagCardR = false;
boolean tagCardL = false;
boolean tagCardZ = false;
boolean tagCardAusruhen = false;
boolean tagCardSD = false;
boolean tagCardOelspur = false;
boolean tagCardVirus = false;
boolean tagCardSpeedPlus = false;
boolean tagCardSpeedMinus = false;
boolean run360 = false;
boolean erstesMal = true;
int geschwindigkeit = 150; //100
char SDlastTagCard[] = "BBBBBBBBBBBB";
char nullNummer[] = "BBBBBBBBBBBB";
const int motor01AnschlussRechts = 5;
const int motor01AnschlussLinks = 6;
const int motor02AnschlussRechts = 10;
const int motor02AnschlussLinks = 11;
long vorherigeMillis = 0;
long timerOnOff = 1;
long Timer90Grad = 800; //310
long Timer180Grad = 2000; //800
long Timer360Grad = 3200; //1600
long Timer1080Grad = 4800; //4800
long TimerAusruhen = 3000; //3000
long TimerPause = 1000; // 1000
boolean roboEingeschaltet = false;
const int buttonPin = 7;
const int led01 = 8;
const int led02 = 4;
const int led03 = 12;
int buttonState = 0;
boolean loslassen = true;
void setup(){
Serial.begin(9600);
pinMode(motor01AnschlussLinks, OUTPUT);
pinMode(motor01AnschlussRechts, OUTPUT);
pinMode(motor02AnschlussLinks, OUTPUT);
pinMode(motor02AnschlussRechts, OUTPUT);
mySerial.begin(9600);
pinMode(RFIDResetPin, OUTPUT);
digitalWrite(RFIDResetPin, HIGH);
pinMode(buttonPin, INPUT);
pinMode(led01, OUTPUT);
pinMode(led02, OUTPUT);
pinMode(led03, OUTPUT);
}
//-----------------------------------------------------------------------------------
void loop(){
onOff();
if (roboEingeschaltet == true){
RFiDreader();
if (tagCardHome == true){
roboHome();
}
else if (tagCardR == true){
roboDrehungRechts();
}
else if (tagCardL == true){
roboDrehungLinks();
}
else if (tagCardZ == true){
roboDrehungZurueck();
}
else if (tagCardSD == true){
roboSdCard();
}
else if (tagCardAusruhen == true){
roboAusruhen();
}
else if (tagCardOelspur == true){
roboOelspur();
}
else if (tagCardSpeedPlus == true){
roboSpeedPlus();
}
else if (tagCardSpeedMinus == true){
roboSpeedMinus();
}
else{
roboVorwaerts();
}
}
else{
roboStillstand();
for(int n=0; n TimerPause){
erstesMal = true;
}
else{
roboPause();
}
}
void roboStillstand(){
Serial.println("Robo stop");
digitalWrite(motor01AnschlussLinks, LOW);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, LOW);
}
void roboVorwaerts(){
Serial.println("Robo vorwaerts");
analogWrite(motor01AnschlussLinks, geschwindigkeit);
analogWrite(motor01AnschlussRechts, LOW);
analogWrite(motor02AnschlussLinks, geschwindigkeit);
analogWrite(motor02AnschlussRechts, LOW);
}
void roboAusruhen(){
Serial.println("robo ausruhen");
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > TimerAusruhen){
tagCardAusruhen = false;
erstesMal = true;
roboPause();
TimerAusruhen = 3000;
return;
}
digitalWrite(motor01AnschlussLinks, LOW);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, LOW);
}
void roboHome(){
Serial.println("Robo Home");
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > Timer1080Grad){
tagCardHome = false;
erstesMal = true;
roboPause();
roboEingeschaltet = false;
return;
}
digitalWrite(motor01AnschlussLinks, HIGH);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, HIGH);
}
void roboDrehungRechts(){
if (tagCardVirus == true){
tagCardR = false;
tagCardL = true;
tagCardVirus = false;
}
else{
Serial.println("Robo nach rechts");
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > Timer90Grad){
tagCardR = false;
erstesMal = true;
roboPause();
return;
}
digitalWrite(motor01AnschlussLinks, HIGH);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, HIGH);
}
}
void roboDrehungLinks(){
if (tagCardVirus == true){
tagCardL = false;
tagCardR = true;
tagCardVirus = false;
}
else{
Serial.println("Robo nach links");
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > Timer90Grad){
tagCardL = false;
erstesMal = true;
roboPause();
return;
}
digitalWrite(motor01AnschlussLinks, LOW);
digitalWrite(motor01AnschlussRechts, HIGH);
digitalWrite(motor02AnschlussLinks, HIGH);
digitalWrite(motor02AnschlussRechts, LOW);
}
}
void roboDrehungZurueck(){
if (tagCardVirus == true){
tagCardZ = false;
tagCardAusruhen = true;
TimerAusruhen = 0;
tagCardVirus = false;
}
else{
Serial.println("Robo umkehren");
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > Timer180Grad){
tagCardZ = false;
erstesMal = true;
roboPause();
return;
}
digitalWrite(motor01AnschlussLinks, HIGH);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, HIGH);
}
}
void roboOelspur(){
Serial.println("Robo Zufallswert");
if (run360 == true){
robo360();
}
else{
int _wuerfel = random(1,5);
Serial.print("XXXX XXXXXXX xXXXXXX xXXXX xX xXXXXXX _wuerfel = ");
Serial.println(_wuerfel);
if (_wuerfel == 1){
tagCardOelspur = false;
tagCardR = true;
}
else if (_wuerfel == 2){
tagCardOelspur = false;
tagCardL = true;
}
else if (_wuerfel == 3){
tagCardOelspur = false;
tagCardZ = true;
}
else if (_wuerfel == 4){
run360 = true;
}
}
}
void robo360(){
Serial.println("Robo 360 Drehung");
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > Timer360Grad){
run360 = false;
tagCardOelspur = false;
erstesMal = true;
roboPause();
return;
}
digitalWrite(motor01AnschlussLinks, HIGH);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, HIGH);
}
void roboSpeedPlus(){
Serial.println("robo Speed Plus");
geschwindigkeit = 150;
TimerAusruhen = 0;
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > TimerAusruhen){
tagCardSpeedPlus = false;
erstesMal = true;
TimerAusruhen = 3000;
roboPause();
return;
}
digitalWrite(motor01AnschlussLinks, LOW);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, LOW);
}
void roboSpeedMinus(){
Serial.println("robo Speed Minus");
geschwindigkeit = 75;
TimerAusruhen = 0;
if (erstesMal == true){
erstesMal = false;
vorherigeMillis = millis();
}
if(millis() - vorherigeMillis > TimerAusruhen){
tagCardSpeedMinus = false;
erstesMal = true;
TimerAusruhen = 3000;
roboPause();
return;
}
digitalWrite(motor01AnschlussLinks, LOW);
digitalWrite(motor01AnschlussRechts, LOW);
digitalWrite(motor02AnschlussLinks, LOW);
digitalWrite(motor02AnschlussRechts, LOW);
}
void roboSdCard(){
Serial.println("Robo SD Setzen");
tagCardSD = false;
for(int i = 0; i for(int j = 0; j < anzahlDerEintraege; j++){
if(strcmp(SDlastTagCard, tagCards[i][j]) == 0){
aktionAusfuehren(i);
}
}
}
}
void RFiDreader() {
char tagString[12];
int index = 0;
boolean reading = false;
while(mySerial.available())
{
int readByte = mySerial.read(); // Nächstes Byte lesen
if(readByte == 2) reading = true; //Indentifizierung für den Anfang des Tags
if(readByte == 3) reading = false; //Indentifizierung für das Ende des Tags
if(reading && readByte != 2 && readByte != 10 && readByte != 13)
{
tagString[index] = readByte; // Tag speichern
index ++;
}
}
if(tagString[0] != 0)
{
Serial.print("tagString = ");
Serial.println(tagString);
for(int i = 0; i for(int j = 0; j < anzahlDerEintraege; j++) // Check Eintrag nach Tag-Nummer
{
if(strcmp(tagString, lastTagCard) != 0) //Neue Tag-Nummer?
{
if(strcmp(tagString, tagCards[i][j]) == 0) //Die neue Nummer hat welche Aktion?
{
for(int m=0; m {
SDlastTagCard[m] = lastTagCard[m];
}
for(int k=0; k {
lastTagCard[k] = tagString[k];
}
roboPause();
aktionAusfuehren(i); //Aktion starten
break;
}
}
}
}
}
memset(tagString,0,strlen(tagString)); //Tag freigeben (mit NULL überschreiben)
resetReader(); //Den RFiD Reader resetten
}
void resetReader() { // Reset Funktion
digitalWrite(RFIDResetPin, LOW);
digitalWrite(RFIDResetPin, HIGH);
delay(150);
}
void aktionAusfuehren(int aktionsNummer) {
switch(aktionsNummer)
{
case 0:
tagCardHome = true;
break;
case 1:
tagCardR = true;
break;
case 2:
tagCardL = true;
break;
case 3:
tagCardZ = true;
break;
case 4:
tagCardAusruhen = true;
break;
case 5:
tagCardSD = true;
break;
case 6:
tagCardOelspur = true;
break;
case 7:
tagCardVirus = true;
break;
case 8:
tagCardSpeedPlus = true;
break;
case 9:
tagCardSpeedMinus = true;
break;
default:
break;
}
}
void onOff() {
buttonState = digitalRead(buttonPin);
Serial.print("buttonState = ");
Serial.println(buttonState);
if (buttonState == LOW){
loslassen = true;
}
else if (buttonState == HIGH && loslassen == true){
roboEingeschaltet = !roboEingeschaltet;
loslassen = false;
ledEins();
}
}
void ledEins() {
if (roboEingeschaltet == true) {
digitalWrite(led01, HIGH);
digitalWrite(led02, HIGH);
digitalWrite(led03, HIGH);
}
else {
digitalWrite(led01, LOW);
digitalWrite(led02, LOW);
digitalWrite(led03, LOW);
}
}
 3. Erstellen der Roll E Aussenhülle und der Tag Icons in Illustrator.
3. Erstellen der Roll E Aussenhülle und der Tag Icons in Illustrator.
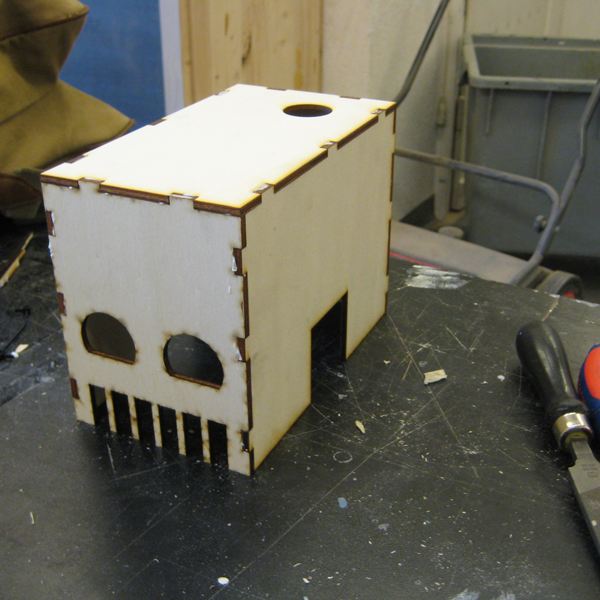
 4. Laser Cutter Nutzung in der Werkstatt.
4. Laser Cutter Nutzung in der Werkstatt.
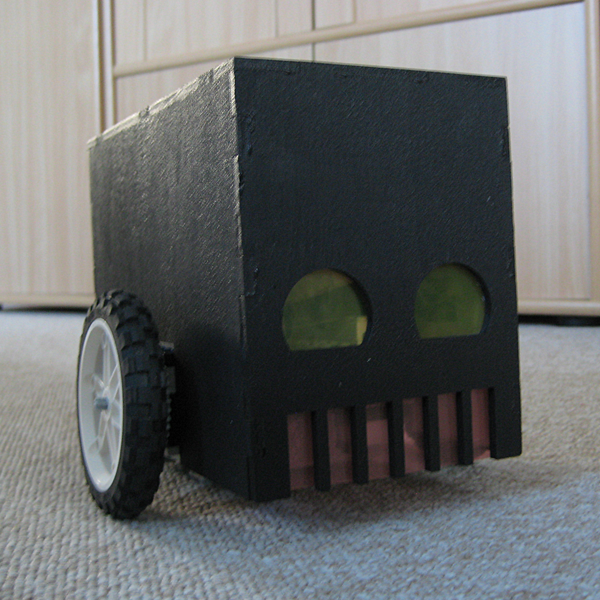
 5. Kleben und bemalen der Roll E Abdeckung
5. Kleben und bemalen der Roll E Abdeckung
 6. Fertigstellung der Tag Cards
6. Fertigstellung der Tag Cards
 7. Kalibrieren der Fahrwerte von Roll E
7. Kalibrieren der Fahrwerte von Roll E