10. November 2010
Gruppe: Sven, Tobi, Cedric Normaler DC Motor an einer H-Brücke Der Motor wechselt alle 2 Sekunden die Richtung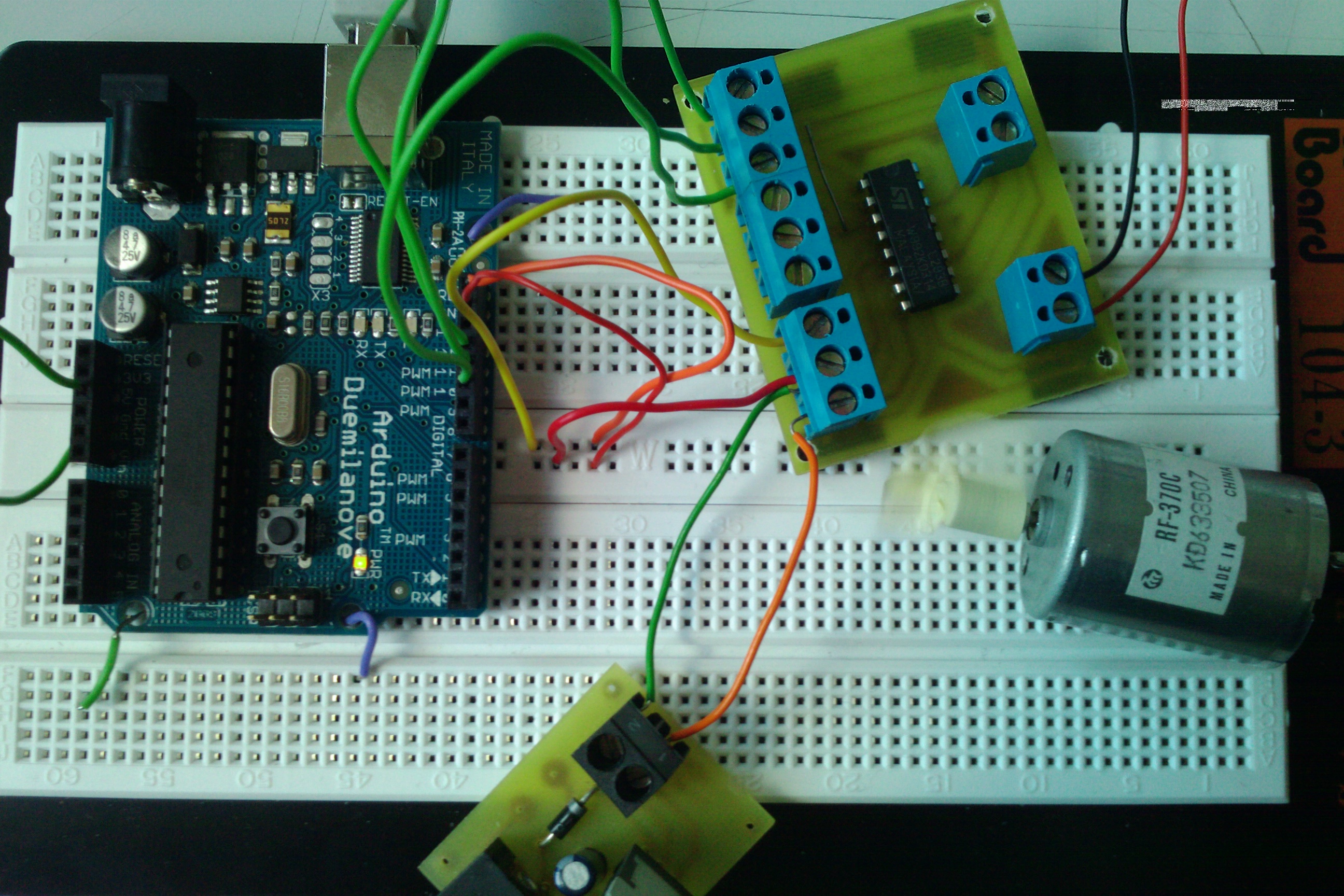
#define ENABLE 12
#define DIR1 11
#define DIR2 10
int richtung = 1;
void setup() {
pinMode(ENABLE, OUTPUT);
digitalWrite(ENABLE, HIGH);
pinMode(DIR1, OUTPUT);
digitalWrite(DIR1, HIGH);
pinMode(DIR2, OUTPUT);DIR2DIR2
digitalWrite(DIR2, LOW);
Serial.begin(9600);
}
void loop() {
if (richtung == 1) {
digitalWrite(DIR1, HIGH);
digitalWrite(DIR2, LOW);
richtung = 2;
Serial.print("digitalRead = ");
Serial.print(digitalRead(DIR1));
Serial.print(",");
Serial.print(digitalRead(DIR2));
Serial.print("richtung = ");
Serial.print(richtung);
Serial.println("");
}
else {
digitalWrite(DIR1,LOW);
digitalWrite(DIR2, HIGH);
richtung = 1;
Serial.print("digitalRead = ");
Serial.print(digitalRead(DIR1));
Serial.print(",");
Serial.print(digitalRead(DIR2));
Serial.print("richtung = ");
Serial.print(richtung);
Serial.println("");
}
delay(2000);
}
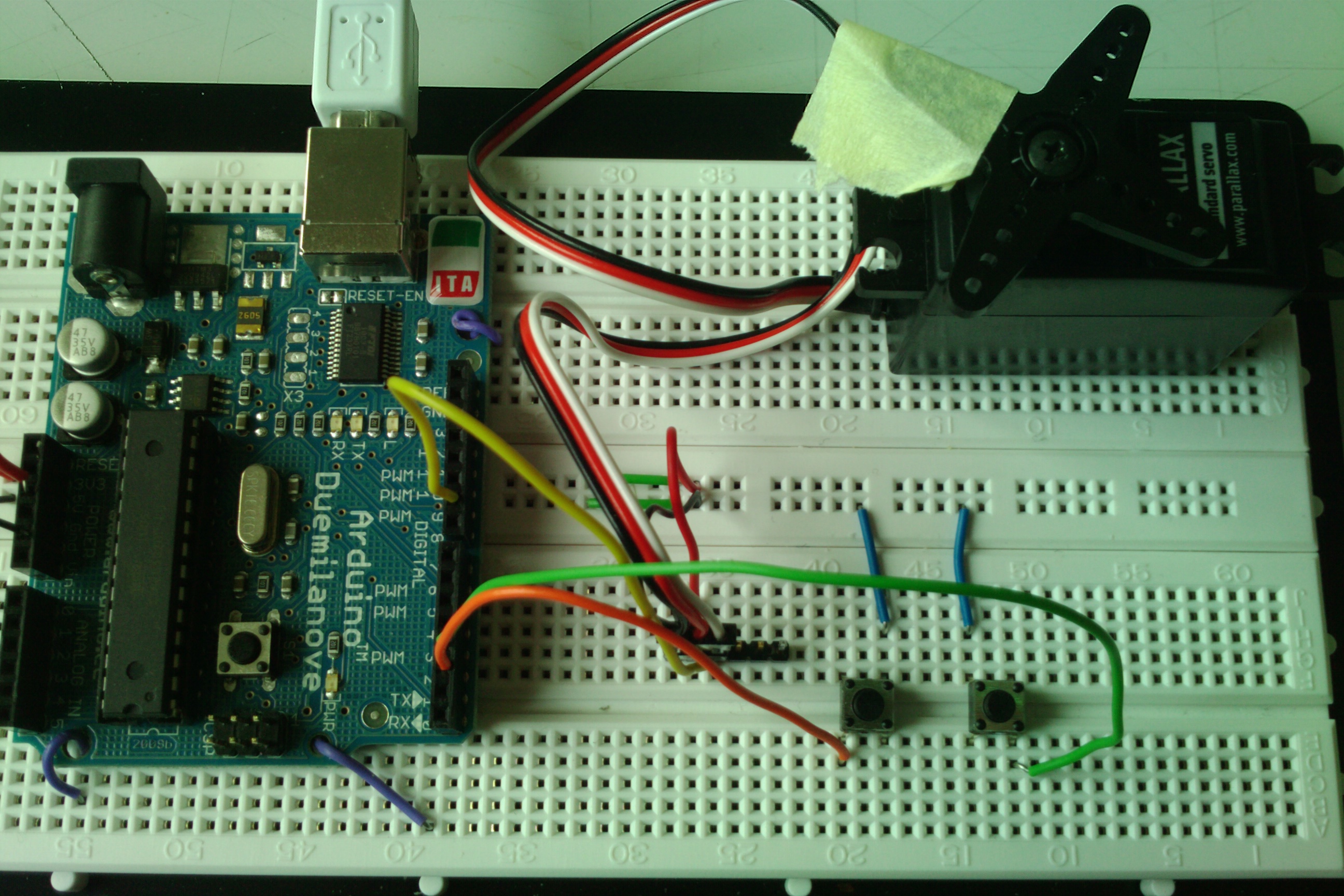
Servomotor mit zwei Taster
Mit dem linken Taster geht der Servomotor auf Position 0°. Mit dem rechten Taster auf die Position 90°.
#include <Servo.h>
const int KNOB0 = 2;
const int KNOB90 = 3;
const int SERVO = 9;
Servo myservo; // create servo object to control a servo
int val; // variable to read the value from the analog pin
void setup()
{
myservo.attach(SERVO);
pinMode(KNOB0, INPUT);
pinMode(KNOB90, INPUT);
digitalWrite(KNOB0, HIGH);
digitalWrite(KNOB90, HIGH);
}
void loop()
{
if(val == 89 && digitalRead(KNOB0) == 0){
val = 0;
myservo.write(val);
}
else if(val == 0 && digitalRead(KNOB90) == 0){
val = 89;
myservo.write(val);
}
}
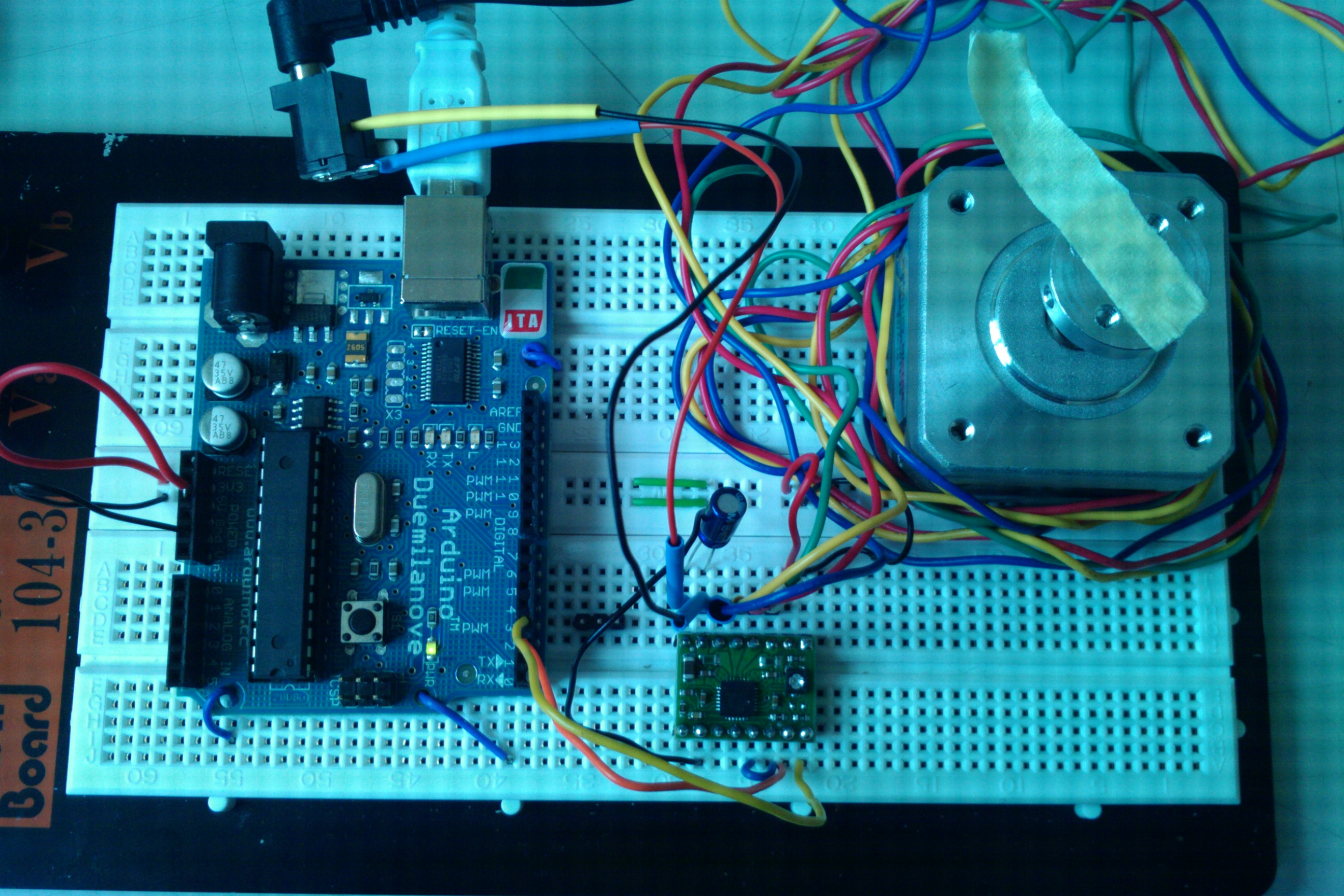
Steppermotor mit Treiberplatte
Der Steppermotor (Schrittmotor) macht jede Sekunde einen Schritt nach Rechts. Nach 5 Sekunden stellt er sich auf die Ausgangsstellung zurück.
#define DIR 3 // Direction Pin
#define STEP 2 // Constant
#define BUT 4 // Direction Button
int count = 0;
void setup(){
pinMode(DIR, OUTPUT); // Direction is an output
pinMode(STEP, OUTPUT); // Step is an output
}
void loop(){
if(count < 5){
digitalWrite(DIR, HIGH); // set direction
stepOnce(); // Step
count++;
}
else{
digitalWrite(DIR, LOW); // set direction
while(count > 0){
stepOnce(); // Step
count--;
}
}
delay(1000);
}
// Function Definition ---------------------------
// the specifications says the low to high transition
// must be at least 1 microsecond
void stepOnce(){
digitalWrite(STEP, HIGH);
delay(1);
digitalWrite(STEP, LOW);
delay(1);
}