Blog-Thema: Arbeitsprozess
Rafael Habegger | 9. Dezember 2010 | Categories: Allgemein, Arbeitsprozess, Daniel Schmider, Garbobot, Lisa Müller, Rafael Habegger, Sebastian Homberger |
STORY Der Wächterroboter ,Garbobot lebt in einer dunklen, vergessenen Ecke einer riesigen Müllhalde der Zukunft, wo sich nur lebloser Abfall stapelt. Seine ursprüngliche Aufgabe war es Müllpiraten mithilfe eines lauten Pfeiftons zu vertreiben. Weil unser Wächterroboter aber wie gesagt in einem längst vergessenen Müllquadranten steht und ihm der letzte Müllpirat vor 114 Jahren begegnete, hat…
Lisa Müller | 17. November 2010 | Categories: Allgemein, Arbeitsprozess, Lisa Müller, Rafael Habegger |

AUFGABE 1: Lest bei dem einen Arduino einen Taster ein und lässt dadurch eine LED am anderen Arduino aufleuchten. Das Arduino auf der Server-Seite steuert zwei Taster, welche beim Client zwei unterschiedliche LEDs high oder low setzen. Da das Signal über das Netzwerk übertragen wird, reagieren die LEDs mit einigen Sekunden Verzögerung. AUFGABE 2: Lest…
Daniel Schmider | 12. November 2010 | Categories: Allgemein, Arbeitsprozess, Daniel Schmider, Rafael Habegger, Sebastian Homberger |

In der Gruppenarbeit mit Rafael und Sebastian haben wir zwei verschiedene Projekte verfolgt. Das eine beinhaltet einen Stepper-Motor, das andere beinhaltet einen DC-Motor; einen Lüfter der normalerweise in einem PC-Gehäuse verwendet wird. Ziel dieses Lüfters war es einen Styropor Ball in einer Röhre anzublasen, sodass dieser in der Luft bleibt. Um die Leistungskraft des Lüfters…
Daniel Schmider | 10. November 2010 | Categories: Allgemein, Arbeitsprozess |
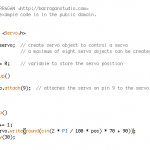
Da ein Servomotor nur in einem Bereich von 0 bis 180 grad Drehen kann, bietet es sich an diesen Bereich mit einer Sinusschwingung abzudecken. Will man zum Beispiel, dass der Motor immer wieder vom Minumum zum Maximum dreht, benötigt man dazu nur 2 Zeilen Code, keine if() Abfragen, oder for() Operatoren, wie dies in den…
Daniel Schmider | 9. November 2010 | Categories: Arbeitsprozess, Diverses |
Um eine KITT Visualisierung per Decoder zu steuern, verwende ich Zweierpotenzen. Um die erste LED leuchten zu lassen, muss die Zahl 1 an den Decoder geschickt werden. Dies entspricht 2 ^0 Die zweite LED hat die Zahl 2^1, die dritte 2^2, usw… Allgemein kann man sagen, um die LED x alleine leuchten zu lassen, muss…
Daniel Schmider | 8. November 2010 | Categories: Allgemein, Arbeitsprozess, Diverses |
Erst zu spät, als es in einem Projekt zu verwenden fiel mir einen Nutzen der Steigung auf: die Auto-Kalibrierung. Oft wenn man mit Daten arbeitet, die sich in Bereichen bewegen die unbekannt oder unersichtlich sind, lohnt es sich mit der Ableitung der Daten zu arbeiten. Arbeitet man mit einem Sensor, der einen klaren Maximal und…
Daniel Schmider | 5. November 2010 | Categories: Allgemein, Arbeitsprozess |
Um eine LED linear zu dimmen (im Gegensatz zur SinusDimmung), verwende ich einen Dreisatz. prozent = 100 / max * mom 100% wird durch den maximalen Rückgabewert des Sensors geteilt und danach mit dem momentanen Wert des Sensors multipliziert. Man erhält eine Zahl zwischen 0 und 100 -> Variable prozent. die LED wird anhand dieser…
Daniel Schmider | 3. November 2010 | Categories: Allgemein, Arbeitsprozess |
An diesem Tag haben wir uns weiterhin mit einem variablen Wiederstand beschäftigt, dieser ist in diesem Fall selbst gebaut und besteht aus zwei Leitplatten, getrennt von mehreren Schichten aus Antistatik-Material. dies führt dazu, dass der Wiederstand durch Druck gesteuert werden kann. Wichtig dabei ist, dass der Vorwiederstand richtig gewählt wird, da dieser die Gewichtung der…
