Blog-Thema: Allgemein
Rafael Habegger | 9. Dezember 2010 | Categories: Allgemein, Arbeitsprozess, Daniel Schmider, Garbobot, Lisa Müller, Rafael Habegger, Sebastian Homberger |
STORY Der Wächterroboter ,Garbobot lebt in einer dunklen, vergessenen Ecke einer riesigen Müllhalde der Zukunft, wo sich nur lebloser Abfall stapelt. Seine ursprüngliche Aufgabe war es Müllpiraten mithilfe eines lauten Pfeiftons zu vertreiben. Weil unser Wächterroboter aber wie gesagt in einem längst vergessenen Müllquadranten steht und ihm der letzte Müllpirat vor 114 Jahren begegnete, hat…
svenweber | 1. Dezember 2010 | Categories: Allgemein, Cédric Steiner, Janine Iten, Pixel-Worm, Sibylle Oeschger, Sven Weber |
Aufgabenstellung Konstruiert ein “Wesen”, dieses soll: Eine “Persönlichkeit” besitzen seine Umgebung wahrnehmen mit der Umgebung interagieren können ja/ nein sagen können sowie einen Wach- und Schlafzustand haben. Entwickelt eine Geschichte/ einen Kontext in dem das Wesen eingebettet ist Making of Video Persönlichkeit Unser Pixel-Wurm, wird aus der Geschichte unten klar. Umgebungswahrnehmung PIXEL-WORM nimmt seine Umwelt…
riccardolardi | 24. November 2010 | Categories: alberto2000, Allgemein, Gian-Andrea Gadient |
Wir haben unser erstes Konzept über Bord geworfen und uns für eine neue Ausgangslage entschieden. Das neue Konzept beruht auf einer Fussmatte, welche den Besucher nur ‘durchlässt’ wenn dieser die Füsse genügend auf der Matte geputzt hat. Die Kommunikation erfolgt über ein physisches Display, auf welchem ‘Gemütszustände’ der Matte abgebildet werden – somit kann die…
Megaman | 23. November 2010 | Categories: Allgemein |
Wir spielen Gott Nein es geht nicht um Sterbehilfe. Ganz im Gegenteil. Denn für das finale Physicalcomputingprojekt besteht die Aufgabe darin “Leben” zu kreieren. Zumindest sollte dieses von uns konstruierte “Wesen” “Persönlichkeit” besitzen. Und wie hat schon Oscar Wilde gesagt:” Ein kritischer Geist kann die Persönlichkeit und das Werk nur dann auslegen und deuten, wenn…
Martin Feigel | 19. November 2010 | Categories: Allgemein, Martin Feigel |

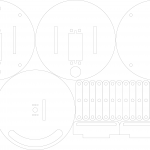
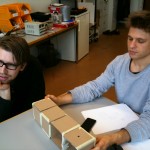
Die Tagesaufgabe, eine unkonventionelle Zeitanzeige/Counter zu erstellen endete im folgendes Konstrukt: Das “Ding” spuckt jede Sekunde eine gewisse Anzahl Styroporkügelchen aus. Als Erweiterung zur Zeitanzeige ist ein Gefäss ähnlich einer Revolverdrehtrommel, welches wärend 10 Sekunden die Kügelchen aufnimmt und sich anschliessend zum nächsten der insgesamt 6 Gefässen dreht. So entsteht eine volle Minute. Als Inspiration…
Martin Feigel | | Categories: Allgemein |
Ziel: Die Verbindung zweier Arduinoboards über ein Netzwerk. Was es braucht: 2 Computer (Server/Client), 2 Arduinoboards und die Software processing. Vorgehen: Auf beiden Arduinoboards die Standartfirmata laden. Processing auf beiden Computern starten und auf einem den Servercode, auf dem anderen den Clientcode laden. Beim Clientcode muss zusätzlich die IP-Adresse des Servers angegeben werden. Diese kann…
Martin Feigel | | Categories: Allgemein, Martin Feigel |
Steuerung zweier Servos mittels Tasten Zwei Servos werden über zwei Taster gesteuert. Wird Taste 1 gedrückt, bewegt sich Servo1 auf die Position 0 Grad. Dasselbe geschieht mit Taste2. Werden beide Tasten gleichzeitig gedrückt, bewegen sie sich auf Position 0 Grad. Wird kein Taster gedrückt, bewegen sich beide Servo’s auf Position 180 Grad. Arduinocode:
Daniel Schmider | 18. November 2010 | Categories: Allgemein |

Heute haben ich und Martin F. uns mit dem RFID Lesegerät auseinandergesetzt. Nachdem wir den Schaltkreis vervollständigt hatten, begannen wir mit dem Code. Dieser benötigt zuerst einmal eine SoftwareSerial – Klasse, damit das Arduino Board mit dem RFID-Leser kommunizieren kann, da dieser Leser nicht direkt mit dem Arduino Programm kommunizieren kann. Mit viel Mühe gelang…