16. November 2011
Aufgabe
2. Lest die Werte eines Potetiometers an einem analogen Pin ein und verändert die Blinkgeschwindigkeit einer LEDMaterial: Potentiometer, Widerstand (10kOhm), LED, Vorwiderstand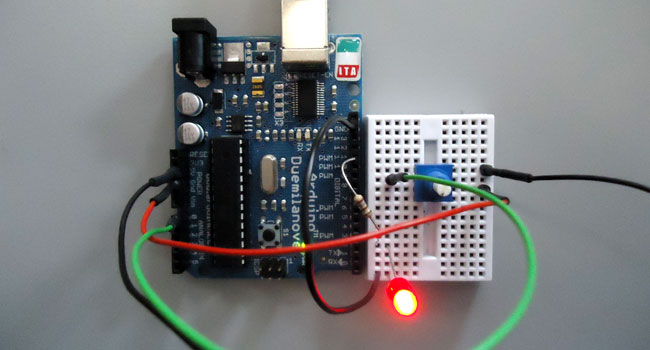 CODE
CODE
// set pin numbers:
const int analogIn = 0;
const int ledPin = 11;
int potiVal = 0;
float foo = 0;
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
}
void loop() {
potiVal = analogRead(analogIn);
//foo = map(potiVal,0,1023,0,255);
foo = potiVal;
digitalWrite(ledPin, HIGH);
delay(foo);
digitalWrite(ledPin, LOW);
delay(foo);
Serial.print(foo);
Serial.println();
}
Aufgabe
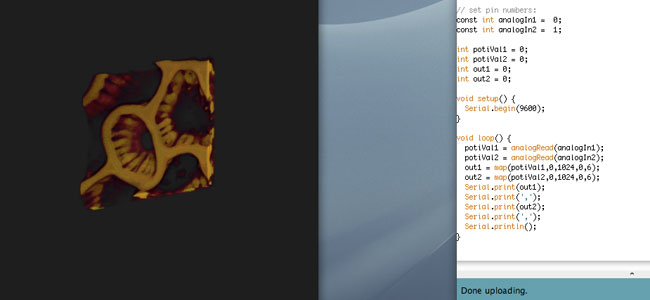
5. Lest die Werte des Sensors in Processing ein und visualisiert diese. Achtet dabei auf eine nachvollziehbare Art der Visualisierung. Material: Sensor, Widerstand, Processing Zwei Drucksensoren (Wiederstände) wurden in einer 3D-Visualisierung für die Rotation von der x- und y-Achse eingesetzt.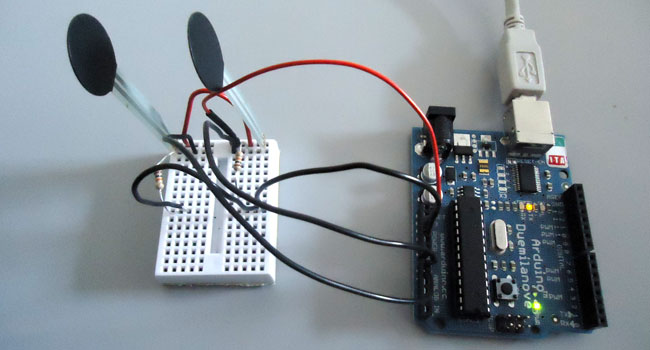
 Arduino
Arduino
// set pin numbers:
const int analogIn1 = 0;
const int analogIn2 = 1;
int potiVal1 = 0;
int potiVal2 = 0;
int out1 = 0;
int out2 = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
potiVal1 = analogRead(analogIn1);
potiVal2 = analogRead(analogIn2);
out1 = map(potiVal1,0,1024,0,6);
out2 = map(potiVal2,0,1024,0,6);
Serial.print(out1);
Serial.print(',');
Serial.print(out2);
Serial.print(',');
Serial.println();
}
Processing
import processing.serial.*;
Serial myPort;
float potiVal1 = 0;
float potiVal2 = 2;
PImage[] imageList = null;
int listLenght = 32;
int factor = 1;
float rotx;
float roty;
boolean done;
boolean switchFlag = false;
int posX = 1;
int posY = 1;
int signY = -1;
void setup() {
size(500, 500, P3D);
println(Serial.list());
myPort = new Serial(this,Serial.list()[0],9600);
done = false;
PImage tmpImage;
color col;
int r,g,b,a;
//init
switchFlag = true;
rotx = 100*TWO_PI + PI/4;
roty = 100*TWO_PI + PI/4;
imageList = new PImage[listLenght];
for(int i=0; i < listLenght; i++) {
tmpImage = loadImage("./pollen/image"+i+".jpg");
tmpImage.loadPixels();
imageList[i] = createImage(tmpImage.width, tmpImage.height, ARGB);
imageList[i].loadPixels();
for(int j=0; j> 16) & 0xff;
g = (col >> 8) & 0x88;
b = col & 0x22;
a = (r+g+b)/3;
col = color(r,g,b,a);
imageList[i].pixels[j] = col;
}
imageList[i].updatePixels();
}
done = true;
noStroke();
}
void draw() {
background(30);
if(done) {
background(30);
ortho(0, width, 0, height, -10, 10);
translate(width, height);
rotateX(rotx);
rotateY(roty);
if(switchFlag) {
for(int i=0; i0; i--) {
beginShape();
texture(imageList[i]);
vertex(-100, -100,i, 0, 0);
vertex(100, -100,i, imageList[i].width, 0);
vertex(100, 100,i, imageList[i].width, imageList[i].height);
vertex(-100, 100,i, 0, imageList[i].height);
endShape();
}
}
} else {
println("loading");
}
}
void serialEvent(Serial myPort) {
if(myPort.available() > 0) {
String completeString = myPort.readStringUntil(10);
if(completeString != null) {
trim(completeString);
println(completeString);
int[] seperateVal = int(split(completeString,','));
potiVal1 = seperateVal[0];
potiVal2 = seperateVal[1];
float rate = 0.01;
rotx += (potiVal1 * rate);
roty += (potiVal2 * rate)*signY;
int fooPosY = int((roty+PI/2)/PI)%2;
int fooPosX = int((rotx+PI/2)/PI)%2;
if(posX != fooPosX) {
posX = fooPosX;
signY *= -1;
switchFlag = !switchFlag;
}
if(posY != fooPosY) {
posY = fooPosY;
switchFlag = !switchFlag;
}
}
}
}