22. November 2011
Aufgaben
3.Visualisiert die Werte des Sensors in Processing – zunächst nur als Liniengrafik Material: MMA7455 Breakout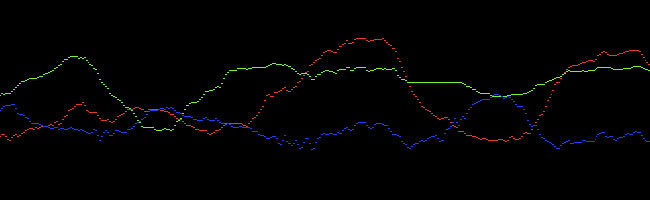 5.Erstellt eine Funktion, die ermittelt, welche Seite des Sensors zur Zeit Oben liegt.
Material: MMA7455 Breakout
Eine Karton-Box wurde mit einem Bewegungssensor und einem Vibrationselement ausgerüstet. Damit wird in jeder Lage ein unterschiedliches Vibrationsfeedback ausgegeben.
Arduino
5.Erstellt eine Funktion, die ermittelt, welche Seite des Sensors zur Zeit Oben liegt.
Material: MMA7455 Breakout
Eine Karton-Box wurde mit einem Bewegungssensor und einem Vibrationselement ausgerüstet. Damit wird in jeder Lage ein unterschiedliches Vibrationsfeedback ausgegeben.
Arduino
#include //Include the Wire library
#include //Include the MMA_7455 library
#define BUFFER_SIZE 20 // actual size of the buffer for integer values: (numberOfValsToRead*6)+(numberOfValsToRead-1)
const int MOTOR = 11;
MMA_7455 mySensor = MMA_7455(); //Make an instance of MMA_7455
char xVal, yVal, zVal; //Variables for the values from the sensor
char incommingBuffer[BUFFER_SIZE]; // buffer to store incomming values
char incomming; // primary buffer to store single incommning bytes
int incommingCounter = 0; // counter for counting the positions inside the buffer
int firstValue, secondValue, thirdValue; // fourthValue, fifthValue, ... // add more if needed
void setup()
{
Serial.begin(9600);
// Set the sensitivity you want to use
// 2 = 2g, 4 = 4g, 8 = 8g
mySensor.initSensitivity(2);
// Calibrate the Offset, that values corespond in
// flat position to: xVal = -30, yVal = -20, zVal = +20
// !!!Activate this after having the first values read out!!!
mySensor.calibrateOffset(14, 25, 0);
pinMode(MOTOR, OUTPUT);
}
void readSerial()
{
while(Serial.available())
{
incomming = Serial.read(); // read single incommning bytes
if(incomming != '\r') //if no carriage return is received proceed in reading the serial port
{
incommingBuffer[incommingCounter++] = incomming; // go on the next position in the buffer
}
else //read until a carriage ('\r') is received
{
incommingBuffer[incommingCounter] = '\0'; // set the last byte to NULL to sign it for the string operators
char *a = strtok(incommingBuffer, ","); // split the string after delimiters into tokens
//char *b = strtok(NULL, ","); // ...
//char *c = strtok(NULL, ","); // ...
//char *d = strtok(NULL, ",.;"); // add another line if needed
firstValue = atoi(a); // convert the strings into integers
//secondValue = atoi(b); // ...
//thirdValue = atoi(c); // ...
//fourthValue = atoi(d); // add another line if needed
incommingCounter = 0; // reset the counter
memset(incommingBuffer, 0, BUFFER_SIZE); //overwrite the incommingBuffer
}
}
}
void loop()
{
readSerial();
xVal = mySensor.readAxis('x'); //Read out the 'x' Axis
yVal = mySensor.readAxis('y'); //Read out the 'y' Axis
zVal = mySensor.readAxis('z'); //Read out the 'z' Axis
Serial.print(xVal, DEC);
Serial.print("\t");
Serial.print(yVal, DEC);
Serial.print("\t");
Serial.println(zVal, DEC);
analogWrite(MOTOR, firstValue);
}
Processing
import processing.serial.*;
Serial myPort;
int xVal, yVal, zVal;
void setup() {
background(0);
size(500, 500, P3D);
println(Serial.list());
myPort = new Serial(this, Serial.list()[0], 9600);
}
void draw() {
background(0);
translate(width/2, height/2);
rotateX(radians(map(xVal, -64, 64, 0, 180)));
rotateY(radians(map(yVal, -64, 64, 0, 180)));
fill(255);
box(90);
float triggerPositive = 0.8;
float triggerNegative = 0.2;
float xValCorrected = float(xVal)/64;
float yValCorrected = float(yVal)/64;
float zValCorrected = float(zVal)/64;
println(xValCorrected +"," +yValCorrected +"," +zValCorrected);
if (xValCorrectedtriggerPositive) {
myPort.write("0\r");
println("SEITE 1");
}
else if (xValCorrectedtriggerPositive && zValCorrected myPort.write("200\r");
println("SEITE 2");
}
else if (xValCorrected myPort.write("150\r");
println("SEITE 3");
}
else if (xValCorrectedtriggerPositive && yValCorrected myPort.write("255\r");
println("SEITE 5");
}
else if (xValCorrected0) {
String completeString = myPort.readStringUntil(10);
if (completeString !=null) {
trim(completeString);
String seperateValues[] = split(completeString, "\t");
xVal = int(seperateValues[0]);
yVal = int(seperateValues[1]);
zVal = int(seperateValues[2]);
}
}
}