17. November 2011

ComeTome
Crazy Machine
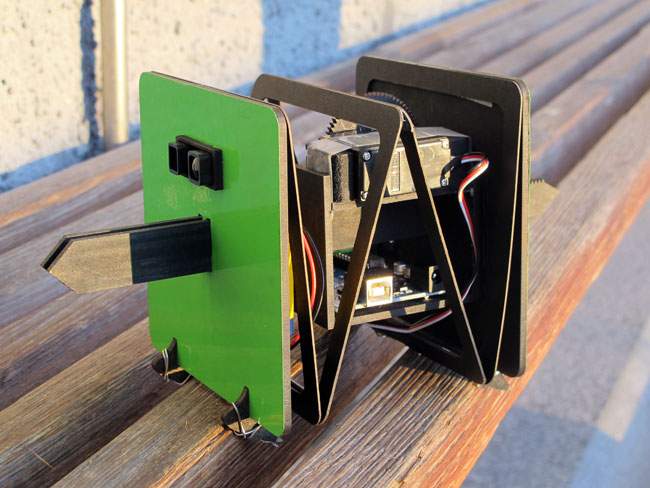
Bei dieser Aufgabe galt es eine Crazy Machine zu entwickeln mit einem Servo, einem Sensor und Arduino-Board. Ich habe mich für ein Objekt entschieden, das sich raubenartig vorwärts bewegen kann. Die Hauptschwierigkeit dabei bestand darin eine Mechanik zu erstellen, welche die Vorder- und Rückseite alternierend zusammenzieht und auseinanderdrückt.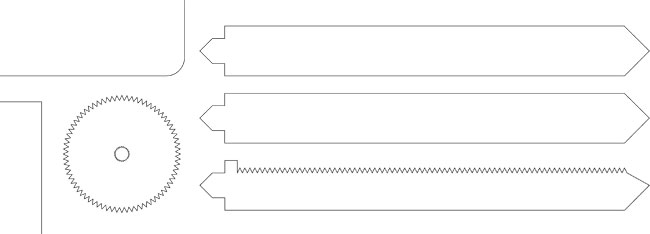 Der Servo sollte mit seiner 180°-Drehung via Zahnradübersetzung die horizontale Bewegung ermöglichen. Ein Distanzmesser an der Vorderplatte sollte das Objekt ab einer bestimmten Nähe in Bewegung setzen. Anfangs hatte ich geplant, dass das Objekt von einem wegläuft, wenn man sich nähert. Ich habe es dann aber interessanter gefunden, wenn sich einem das Objekt nähert, wodurch dann auch sein Name entstanden ist (ComeTome = Come To Me).
Der Servo sollte mit seiner 180°-Drehung via Zahnradübersetzung die horizontale Bewegung ermöglichen. Ein Distanzmesser an der Vorderplatte sollte das Objekt ab einer bestimmten Nähe in Bewegung setzen. Anfangs hatte ich geplant, dass das Objekt von einem wegläuft, wenn man sich nähert. Ich habe es dann aber interessanter gefunden, wenn sich einem das Objekt nähert, wodurch dann auch sein Name entstanden ist (ComeTome = Come To Me).
 Die Einzelteile wie Zahnrad, Schienen, Platten, Balg habe ich in Illustrator kontruiert und dann am Laser-Cutter aus Pattex schneiden lassen. Schwarze Mattfarbe verleihte dem Objekt dann noch die nötige Eleganz. Die grüne Folien waren Reste aus dem AR-Modul und bot den richtigen Farbakzent.
Die Einzelteile wie Zahnrad, Schienen, Platten, Balg habe ich in Illustrator kontruiert und dann am Laser-Cutter aus Pattex schneiden lassen. Schwarze Mattfarbe verleihte dem Objekt dann noch die nötige Eleganz. Die grüne Folien waren Reste aus dem AR-Modul und bot den richtigen Farbakzent.
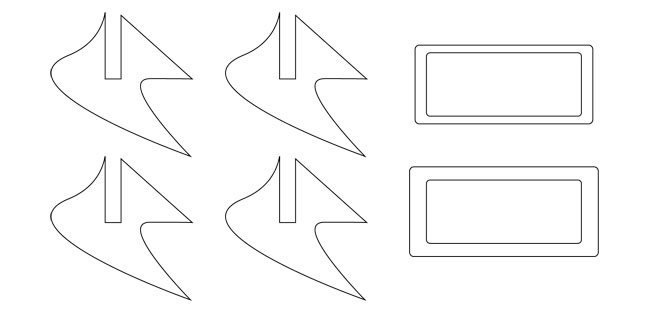 Damit sich das Objekt nicht nur auseinander- und zusammenzieht ohne sich vorwärts zu bewegen, musste ich mir eine Lösung überlegen wie den Widerstand in eine Richtung verlagern kann. Hierfür habe ich als "Füsse" kleine Haken ausgelasert und diese am Schluss mit Draht versehen, sodass sich diese im Untergrund verhaken können und sich das Objekt somit in eine Richtung bewegen kann.
Damit sich das Objekt nicht nur auseinander- und zusammenzieht ohne sich vorwärts zu bewegen, musste ich mir eine Lösung überlegen wie den Widerstand in eine Richtung verlagern kann. Hierfür habe ich als "Füsse" kleine Haken ausgelasert und diese am Schluss mit Draht versehen, sodass sich diese im Untergrund verhaken können und sich das Objekt somit in eine Richtung bewegen kann.
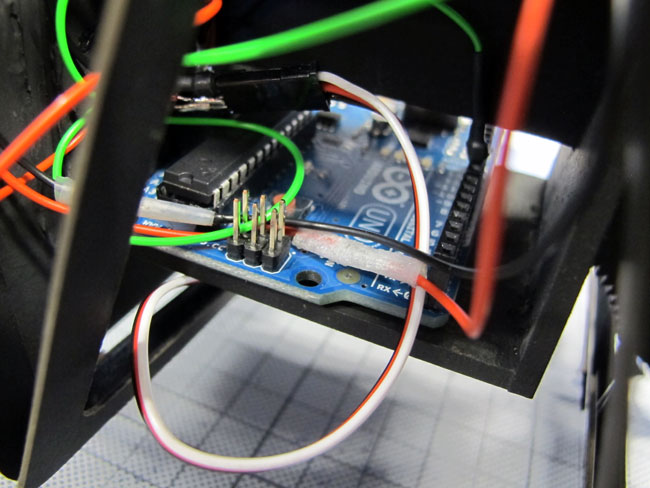
Arduino-Board unterhalb der Antriebsbox

Distanzsensor an der Vorderseite löst Bewegung aus
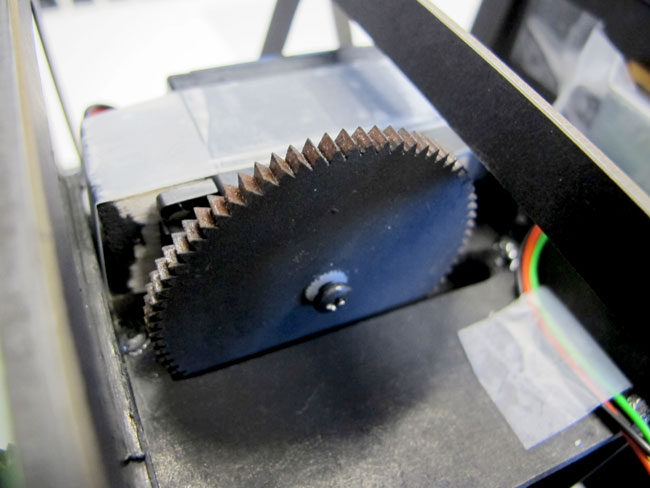
Zahnrad überträgt Servobewegung in die Horizontale
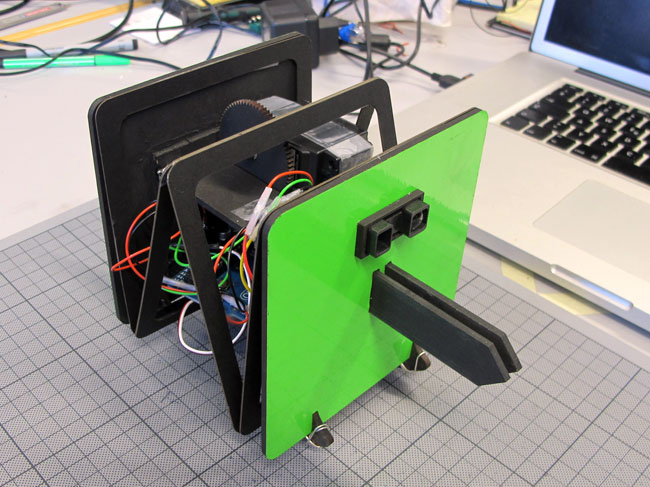
Voderansicht ComeTome
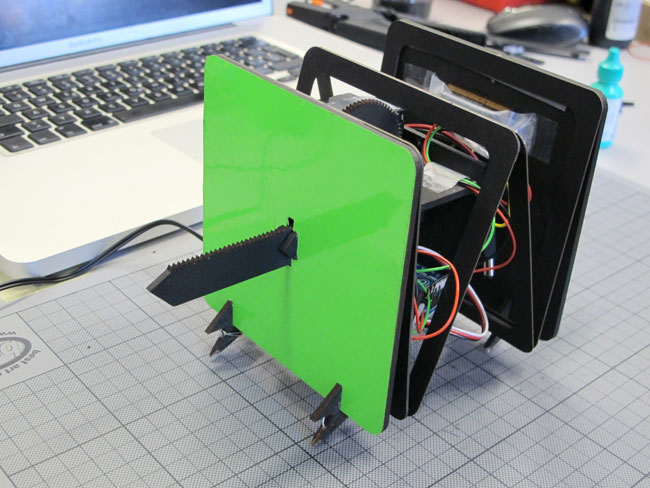
Rückansicht ComeTome mit Zahnradblatt