17. November 2011
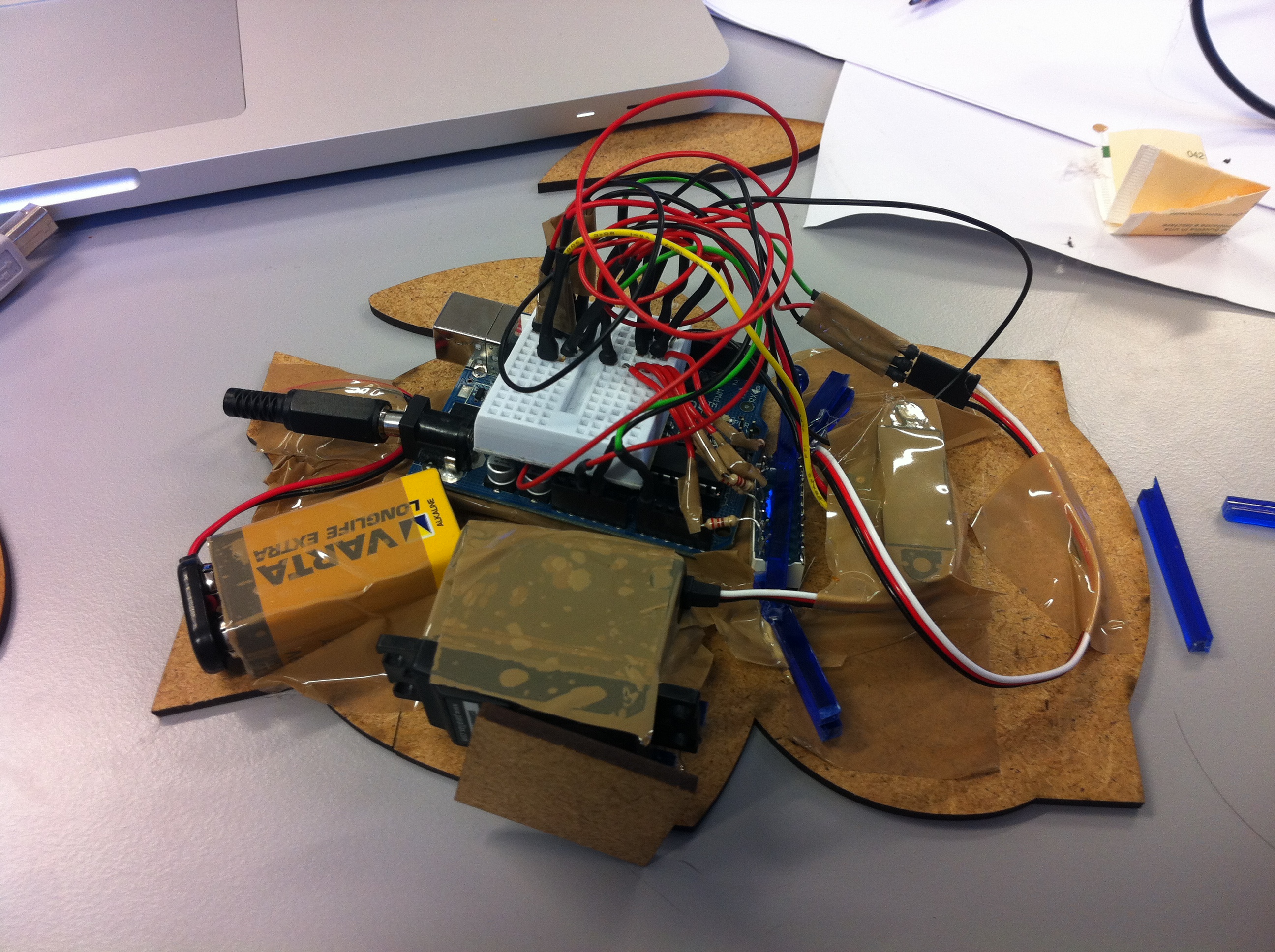
Im Zweitägigen DO-YOUR-OWN-ROBOT Projekt, bauten Rafael und ich einen Judo Kämpfer der per Infrarot Sensor den Arm als Selbstverteidigung 90° nach oben hebt sobald man ihm zu nahe kommt. Die Zähne bestehen aus einem Lauflicht, das jedoch konstant leuchtet. Handskizze, später auf Illustrator übertragen und auf der Lasermaschine aus Holz ausgeshcnitten.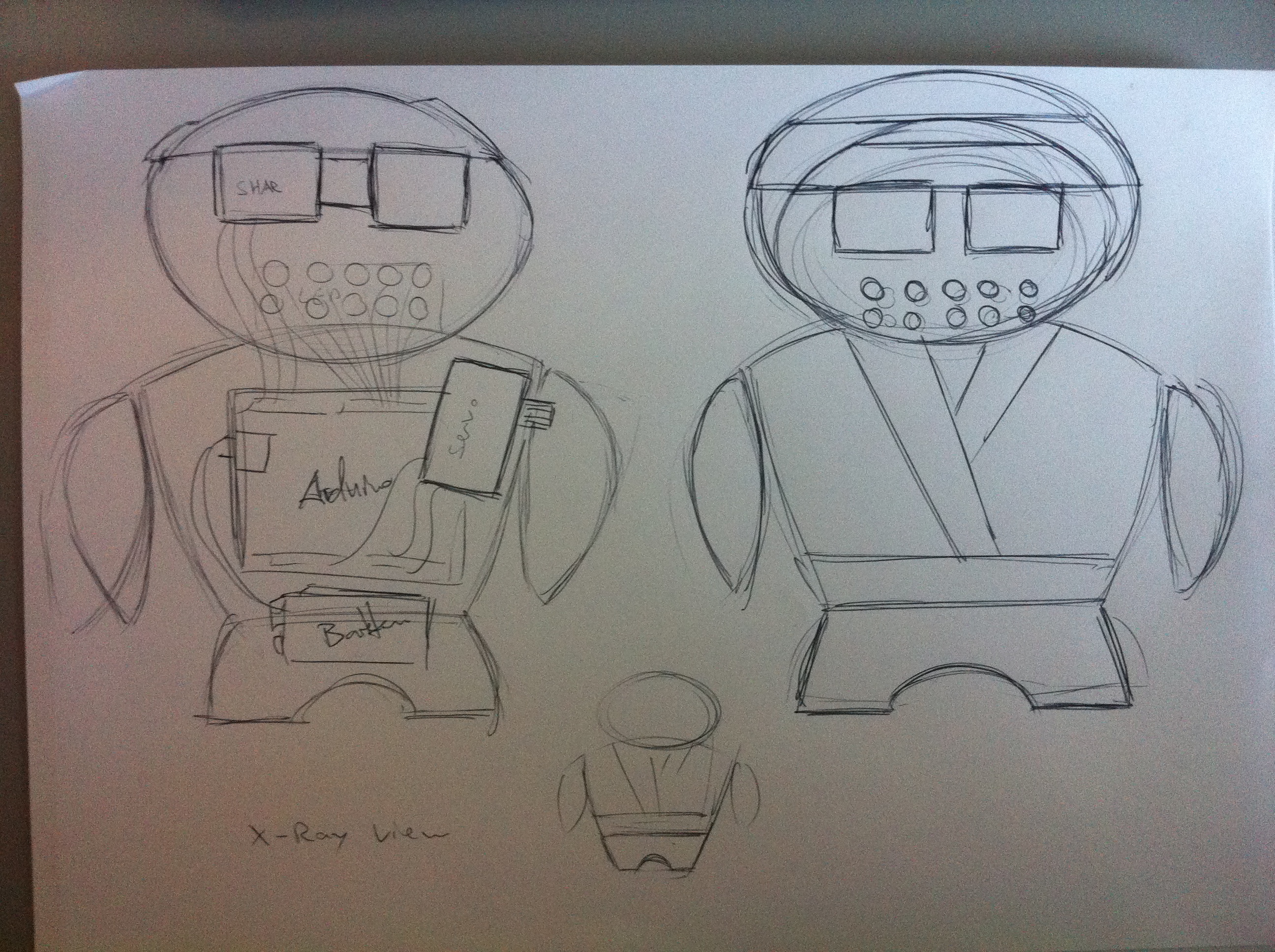 Verkabelung des "Innenleben" des Roboters
Verkabelung des "Innenleben" des Roboters
 Fertiges Modell. Alle Komponenten Zwischen den beiden Holzplatten verbaut, rechter Arm an den Servo befestigt und am Ende den Roboter in ein Kimono gesteckt.
Fertiges Modell. Alle Komponenten Zwischen den beiden Holzplatten verbaut, rechter Arm an den Servo befestigt und am Ende den Roboter in ein Kimono gesteckt.

#include <Servo.h>
Servo myServo;
#define SERVO_PIN 11
#define IN_PIN 0
int oldVal = 0;
int newVal = 0;
//char LED_PINS[11];
void setup()
{
myServo.attach(SERVO_PIN);
Serial.begin(9600);
/*for (char i = 1; i < 12; i = i + 1) {
LED_PINS[i] =i;
pinMode(LED_PINS[i], OUTPUT);
}*/
}
void loop()
{
newVal = analogRead(IN_PIN);
newVal = (0.95*oldVal)+(0.05*newVal);
myServo.write(map(newVal,0,500,70,178));
Serial.print(myServo.read());
Serial.print(" ");
Serial.println(newVal);
oldVal = newVal;
//ledOn();
}