23. November 2011
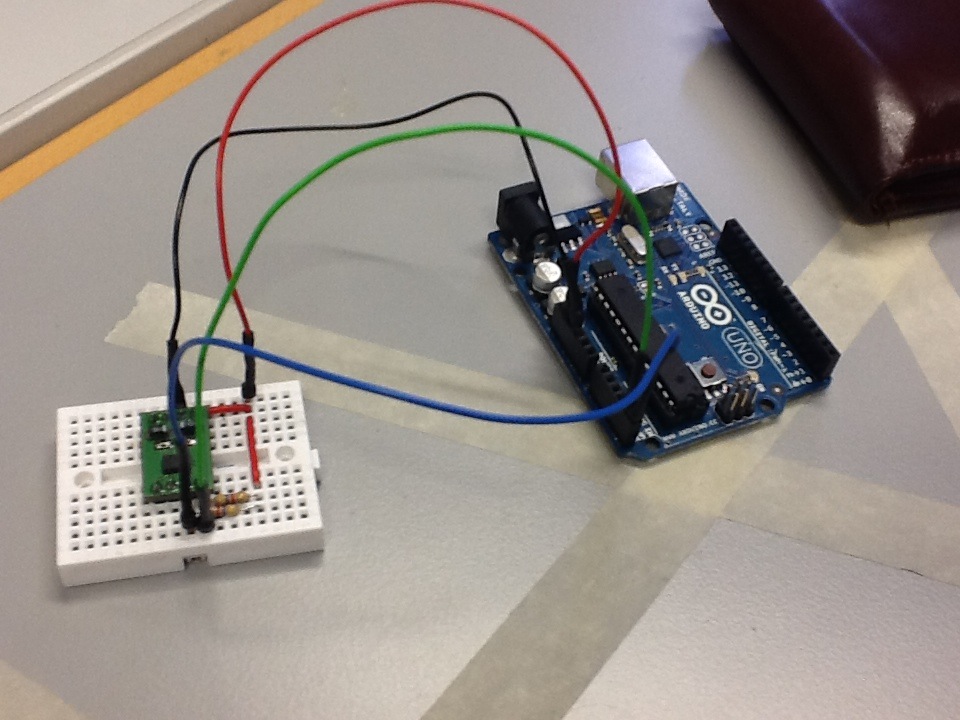 In einem weiteren Modul in diesem Kurs, schauten wir einen Beschleunigungsensor an. Mit dem Arduino lesen wir den Sensor aus und ürgeben dann die Daten an Processing, welches errechnet in welcher Lage sich der Sensor befindet.
As kleines Feature habe ich eine automatische Kalibrierung für den Sensor eingebaut.
Arduino
In einem weiteren Modul in diesem Kurs, schauten wir einen Beschleunigungsensor an. Mit dem Arduino lesen wir den Sensor aus und ürgeben dann die Daten an Processing, welches errechnet in welcher Lage sich der Sensor befindet.
As kleines Feature habe ich eine automatische Kalibrierung für den Sensor eingebaut.
Arduino
// Includes
#include <Wire.h>
#include <MMA_7455.h>
// Objeczs
MMA_7455 sensor = MMA_7455();
// Variables
char xNew, yNew, zNew;
char xOld, yOld, zOld;
// Setup
void setup()
{
// Begin Serial
Serial.begin(9600);
// Set Sensitivity
sensor.initSensitivity(2);
// Wait
delay(200);
// Read Raw Orientation
char x = sensor.readAxis('x');
char y = sensor.readAxis('y');
char z = sensor.readAxis('z');
// Calibrate
sensor.calibrateOffset(0-x,0-y,64-z);
}
void loop()
{
xNew = sensor.readAxis('x');
yNew = sensor.readAxis('y');
zNew = sensor.readAxis('z');
xNew = (0.5*xOld) + (0.5*xNew);
yNew = (0.5*yOld) + (0.5*yNew);
zNew = (0.5*zOld) + (0.5*zNew);
xOld = xNew;
yOld = yNew;
zOld = zNew;
printOrientation(xNew,yNew,zNew);
}
// Print Orientation to Serial
void printOrientation(char x, char y, char z)
{
Serial.print(x,DEC);
Serial.print("\t");
Serial.print(y,DEC);
Serial.print("\t");
Serial.print(z,DEC);
Serial.print("\t");
Serial.println();
}
Processing:
// Includes
import processing.serial.*;
// Objects
Serial serial;
// Variables
int rawX, rawY, rawZ;
int accX, accY, accZ;
String lastMode = "";
// Setup Routine
void setup()
{
background(0);
size(500,500,P3D);
frameRate(30);
println(serial.list());
serial = new Serial(this,serial.list()[0],9600);
loop();
}
// Draw Loop
void draw()
{
// Set Background
background(0);
// Create String
String str = accX+""+accY+""+accZ;
// Check
if(!lastMode.equals(str))
{
// Conditions
if(str.equals("002")) {
println("Normal");
} else if(str.equals("200")) {
println("Links gekippt");
} else if(str.equals("100")) {
println("Rechts gekippt");
} else if(str.equals("010")) {
println("Hinten gekippt");
} else if(str.equals("020")) {
println("Vorne gekippt");
} else if(str.equals("001")) {
println("Nach Unten");
}
// Save
lastMode = str;
}
}
// Serial Data Event
void serialEvent(Serial data)
{
// Check for Data
if (data.available() > 0)
{
// Get whole String
String completeString = data.readStringUntil(10);
// Check String
if (completeString != null)
{
// Remove whitespace
trim(completeString);
// Split
String seperateValues[] = split(completeString,"\t");
// Set Variables
rawX = int(seperateValues[0]);
rawY = int(seperateValues[1]);
rawZ = int(seperateValues[2]);
// Calculate
accX = calc(rawX);
accY = calc(rawY);
accZ = calc(rawZ);
}
}
}
// Calculate Value
int calc(int in)
{
if(in >= 40) { return 2; }
if(in <= -40) { return 1; }
return 0;
}
// Stop Sketch
void stop()
{
// Close Serial Connection
serial.stop();
super.stop();
}