1. Dezember 2011
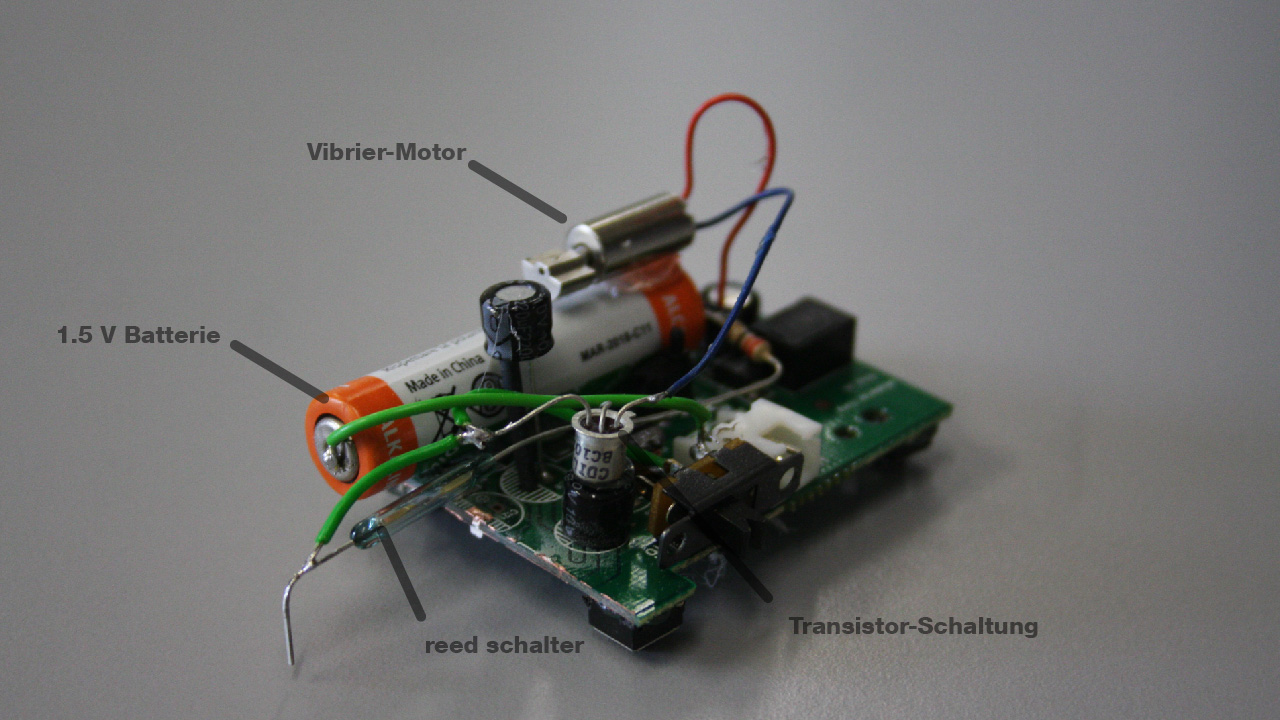
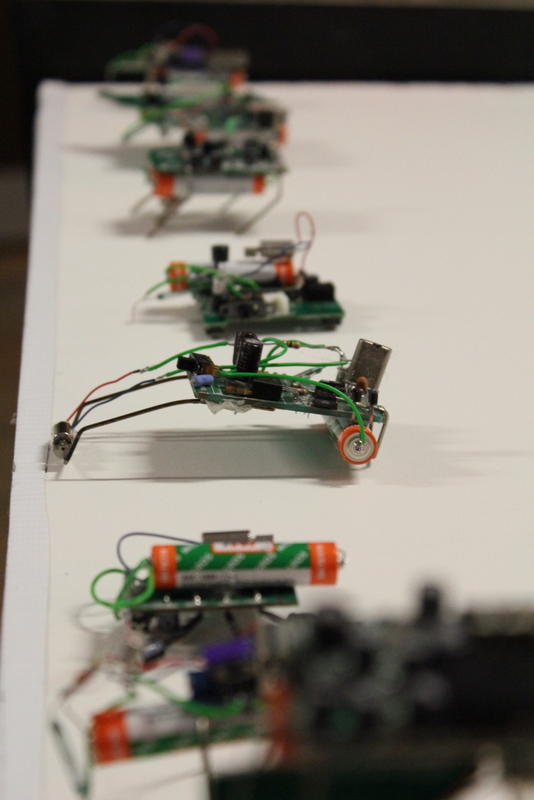
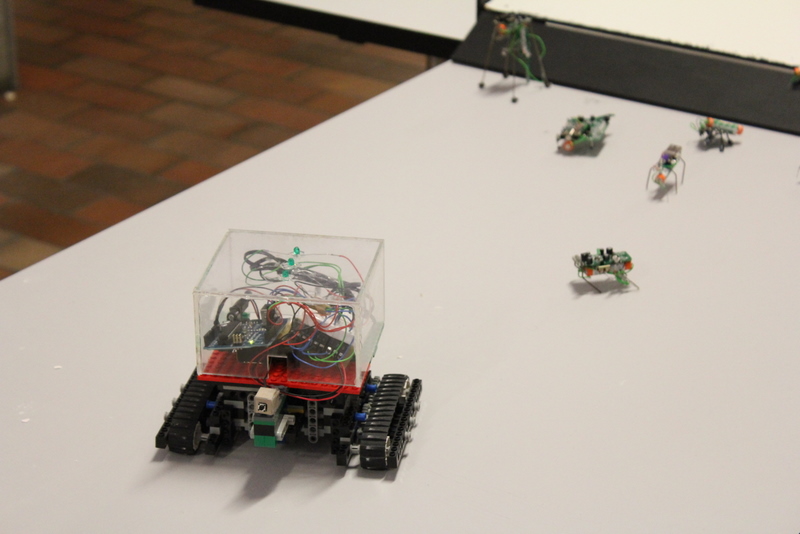
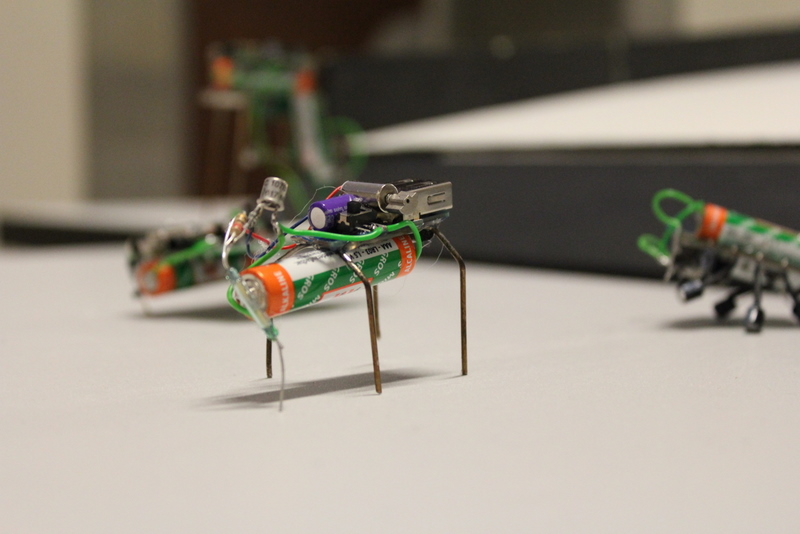
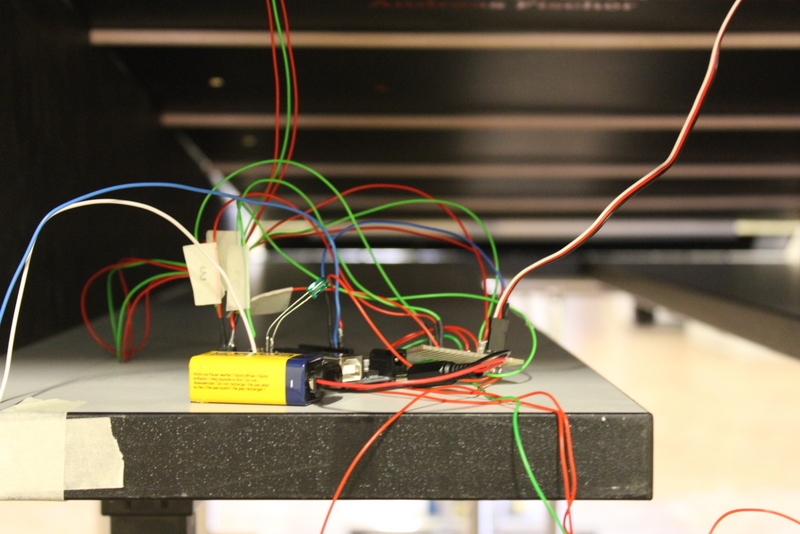
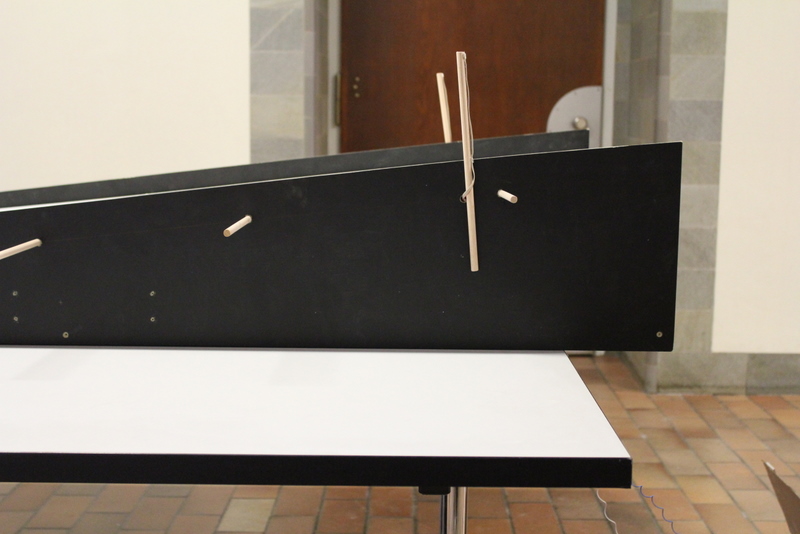
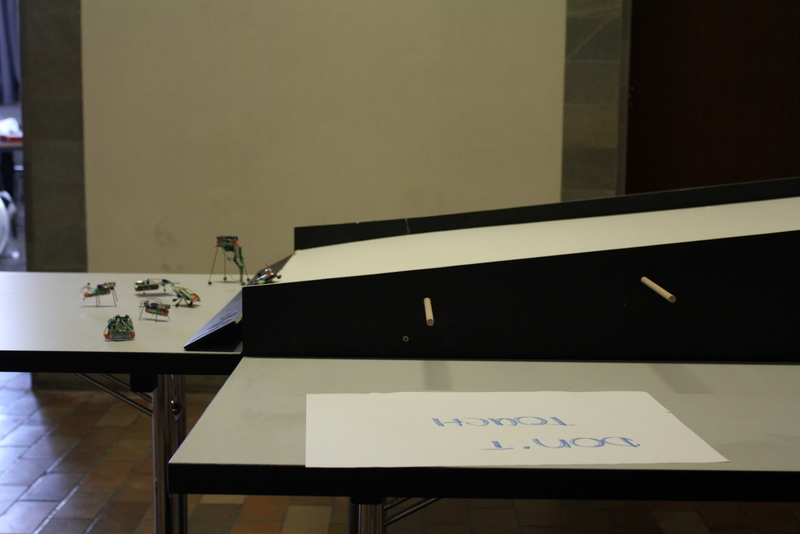
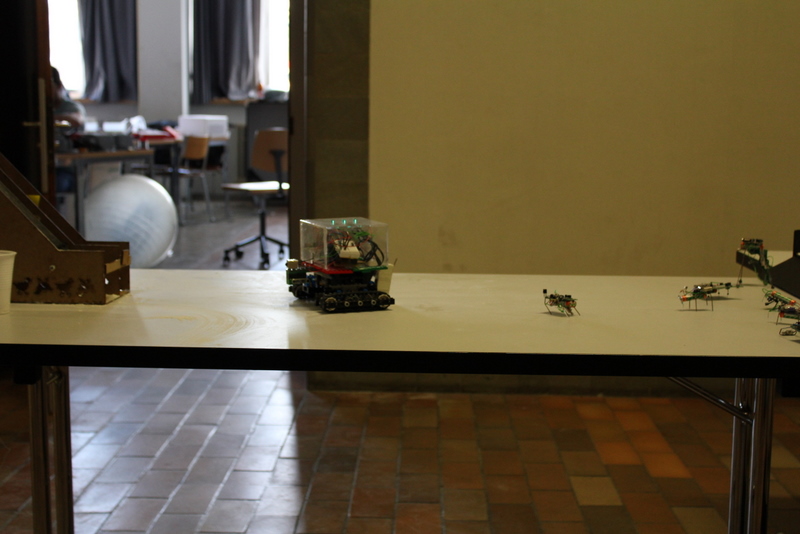
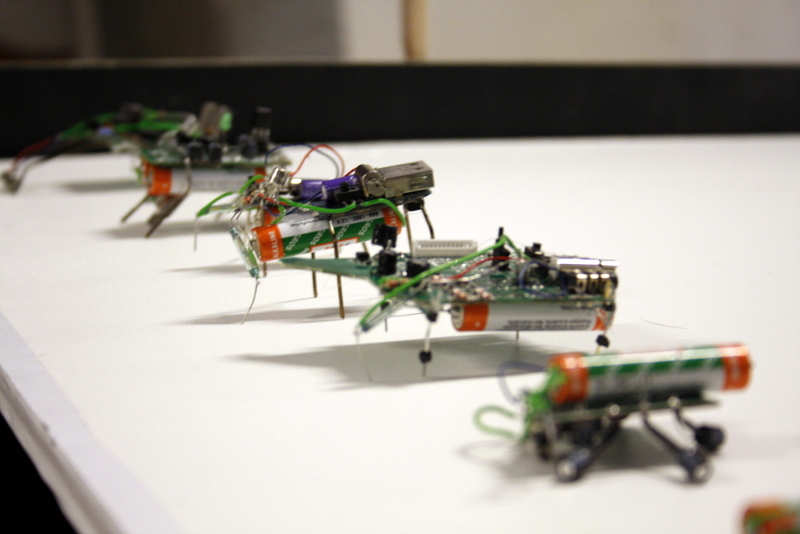
Ein Rennbahn mit verschiedenen "Vibrobots" (auch Bristlebots genannt) sollen eine Rennstrecke durchlaufen und dabei am Ziel das nächste Modul auslösen. Die Technologie wurde mit einfachen Mitteln getestet. Erste Prototypen wurden mit Ping-Pong Bällen und anderen Materialien realisiert: Die Kandidaten: Der Reedschalter ist ein Schalter, der sich öffnet/schliesst, wenn in unmittelbarer Nähe sich ein Magnet befindet. Da wir nur Öffner fanden, mussten wir bei jedem "Bot" eine Transistorschaltung einbauen, damit der Reed-Schalter zu einem Schliesser wird. D.h, an der Startrampe wurden Magnete unterhalb der Roboter montiert. In diesem Zustand waren sie inaktiv. Sobald die Magnete entfernt werden(gesteuert durch ein Servo-Motor), aktivieren sich die Roboter und vibrieren den leicht schrägen Hang Richtung Ziel hinunter.
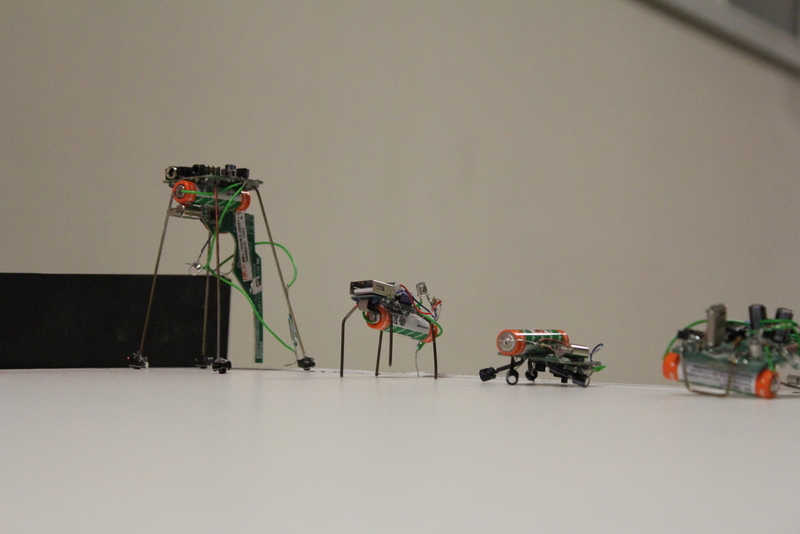
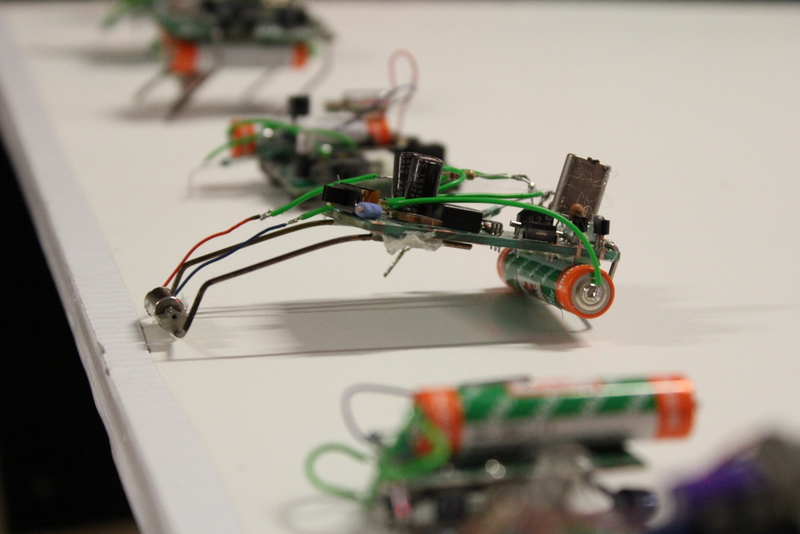
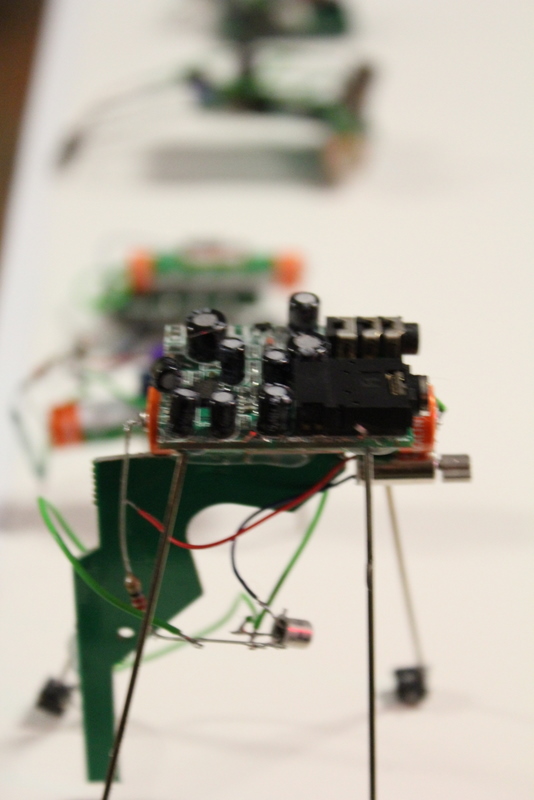
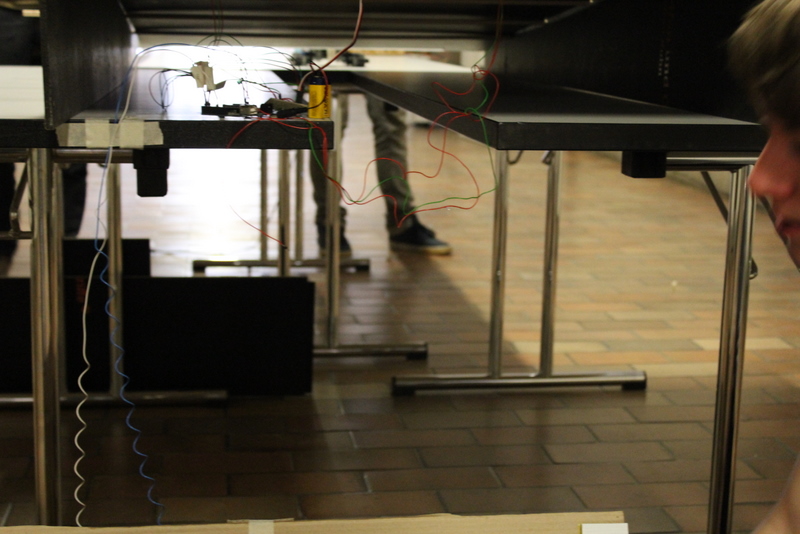
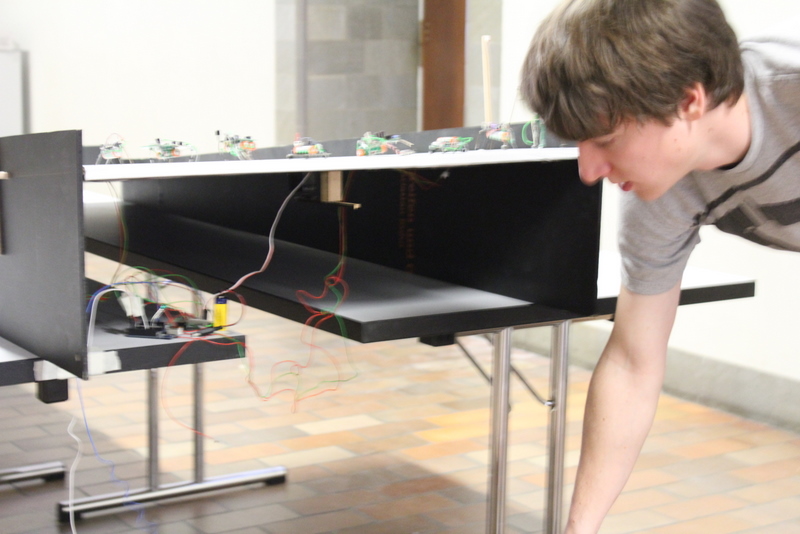
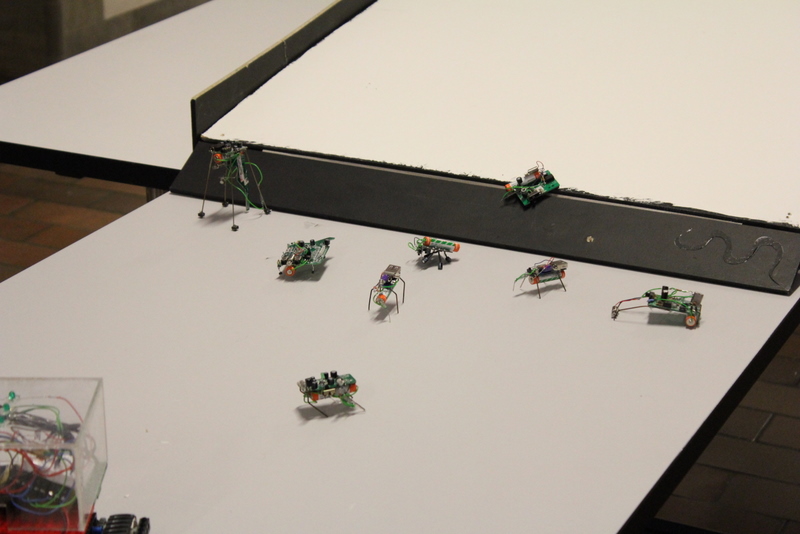
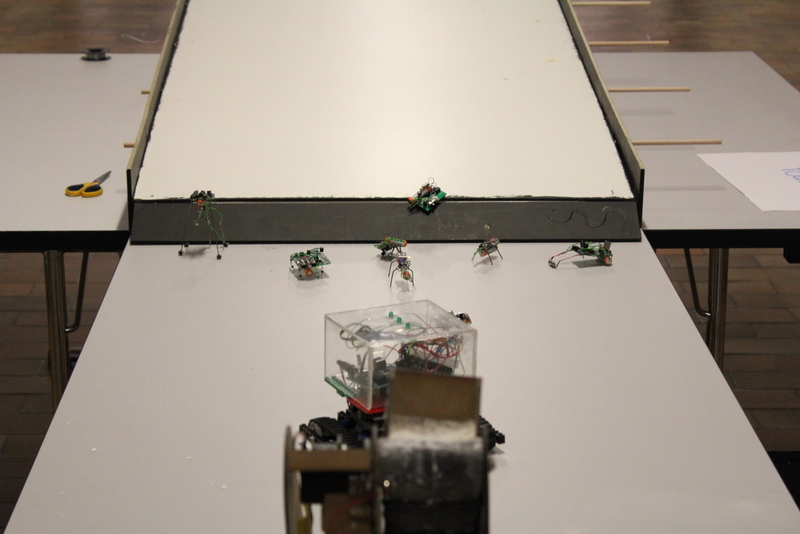
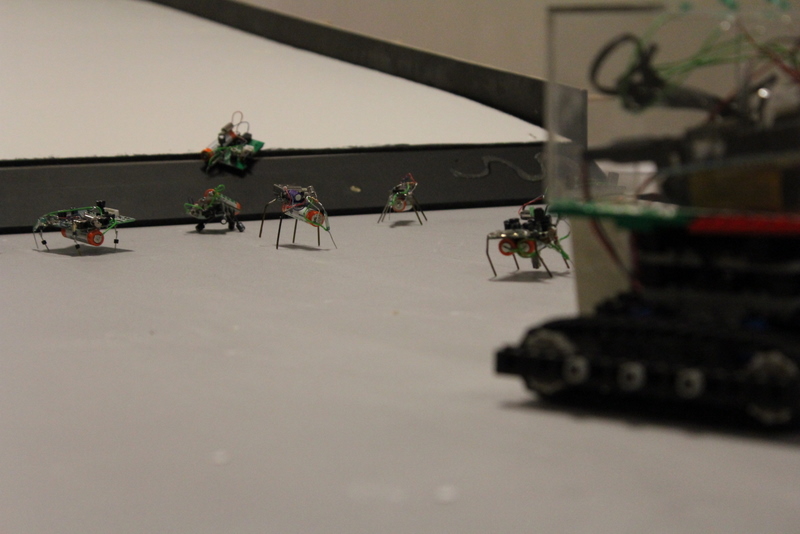
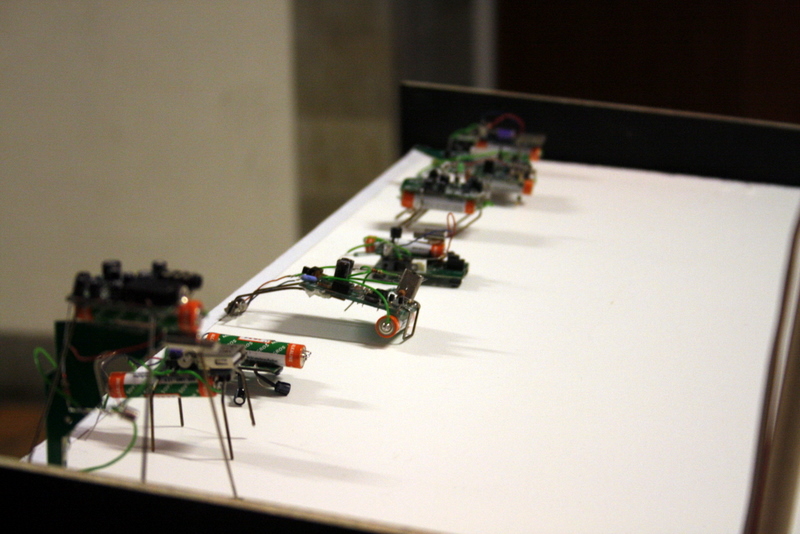
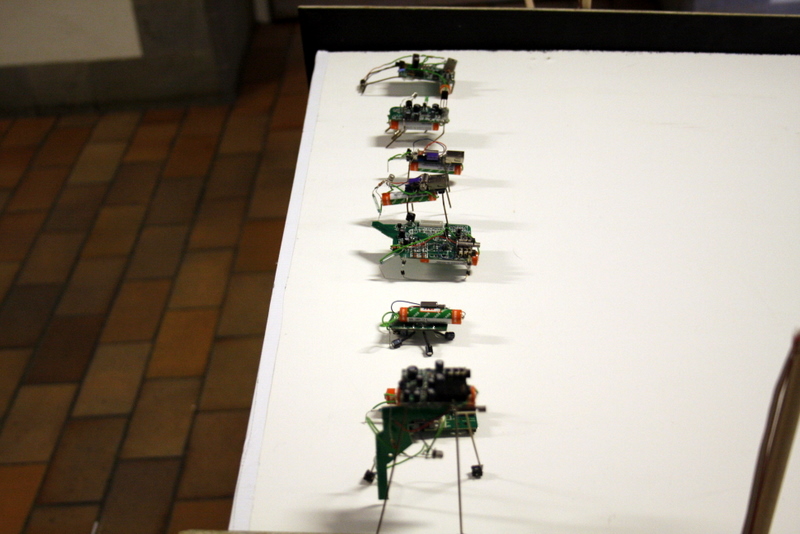
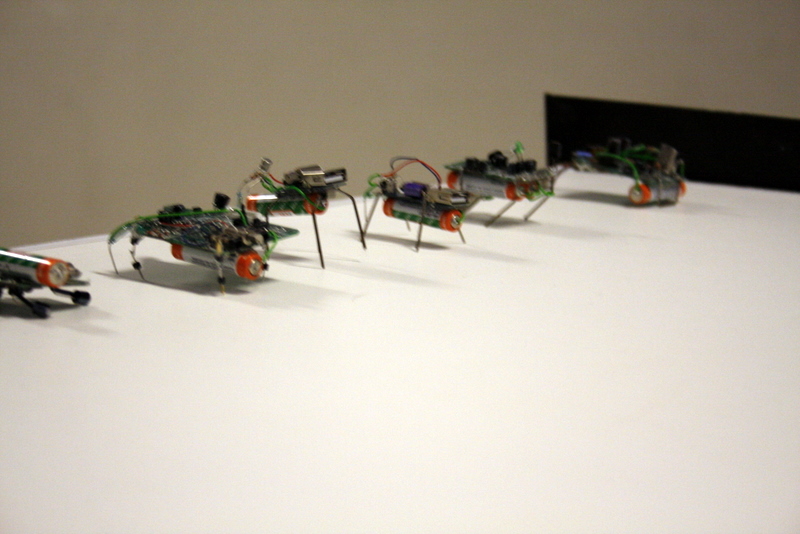
 Einige Impressionen:
Einige Impressionen:








#include <Servo.h>
Servo myservo; // create servo object to control a servo
unsigned long timeStamp = 0;
const unsigned long startDelay = 3000;
boolean onOff = false;
boolean startServo = false;
void setup() {
Serial.begin(9600);
myservo.write(0);
//LED
pinMode(2, OUTPUT); //green1
pinMode(3, OUTPUT); //red1
pinMode(4, OUTPUT); //green2
pinMode(5, OUTPUT); //red2
pinMode(13, OUTPUT); //debug LED
pinMode(10, INPUT); //input von Joel & Eva
digitalWrite(10, LOW); //initializing
myservo.attach(9); // attaches the servo on pin 9 to the servo object
digitalWrite(2, LOW); //starts with green1
digitalWrite(4, LOW); //starts with red2
digitalWrite(3, HIGH); //starts with red1
digitalWrite(5, HIGH); //starts with red2
myservo.write(0); //initialize servo position
}
void loop() {
if(digitalRead(10) == HIGH){ //get start signal from Joel & Eva
timeStamp = millis(); //save time
onOff = true; //loop only once
digitalWrite(3, HIGH); //turn green1 on
digitalWrite(5, HIGH); //turn green2 on
}
if(millis() - timeStamp > startDelay && onOff){
digitalWrite(13, HIGH);
onOff = false; //loop only once
ledSequence(); //start LED sequence
timeStamp = millis(); //set new timestamp
}
}
//LED start sequence
void ledSequence(){
digitalWrite(3, LOW);
digitalWrite(5, LOW);
delay(200);
digitalWrite(5, HIGH);
digitalWrite(3, HIGH);
delay(500);
digitalWrite(3, LOW);
digitalWrite(5, LOW);
delay(200);
digitalWrite(5, HIGH);
digitalWrite(3, HIGH);
delay(500);
digitalWrite(3, LOW);
digitalWrite(5, LOW);
delay(200);
digitalWrite(5, HIGH);
digitalWrite(3, HIGH);
delay(500);
digitalWrite(2, HIGH); //turn green1 off
digitalWrite(4, HIGH); //turn green2 off
digitalWrite(3, LOW); //turn red1 off
digitalWrite(5, LOW); //turn red2 off
myservo.write(90); //activate servo (turn 90 degrees)
}