4. Dezember 2011
In einem einwöchigem Projekt bauten wir in kleinen Teams jeweils eine Maschine, die einen Impuls aufnehmen aber auch wieder einen Impuls abgeben kann. Am Schluss reihten wir diese kleinen Maschinen aneinander, sodass jeweils die nächste Maschine von der letzten ausgelöst wird und sich eine Kettenreaktion bilden kann. Nach dem entwerfen von Konzepten, beschloss unsere Klasse, dass unsere Maschine - ein Eierförderband - die Schlussposition einnehmen wird. Ursprünglich war gedacht, dass ein mit Mehl gefülltes Ei eine Rampe hochtransportiert wird, hinunterfällt und zerbricht. Vorher wurde in der Aufschlagsregion mit Leim ein Schriftzug geschrieben, auf dem das Mehl haften bleibt. Überschüssiges Mehl wird dann von einem PC-Lüfter weggeblasen, der durch das herabfallende Ei von einem Sensor ausgelöst wird. Weil aber dieser Lüfter zu schwach war, entschieden wir uns, dass das Ei direkt auf den Lüfter fallen sollte, der das Gemisch aus zerfetzten Eierschalen und Mehl mit einer grossen Staubwolke in die Luft pusten sollte. Ein Ei bläst sich nicht von alleine aus...
Ein Ei bläst sich nicht von alleine aus...
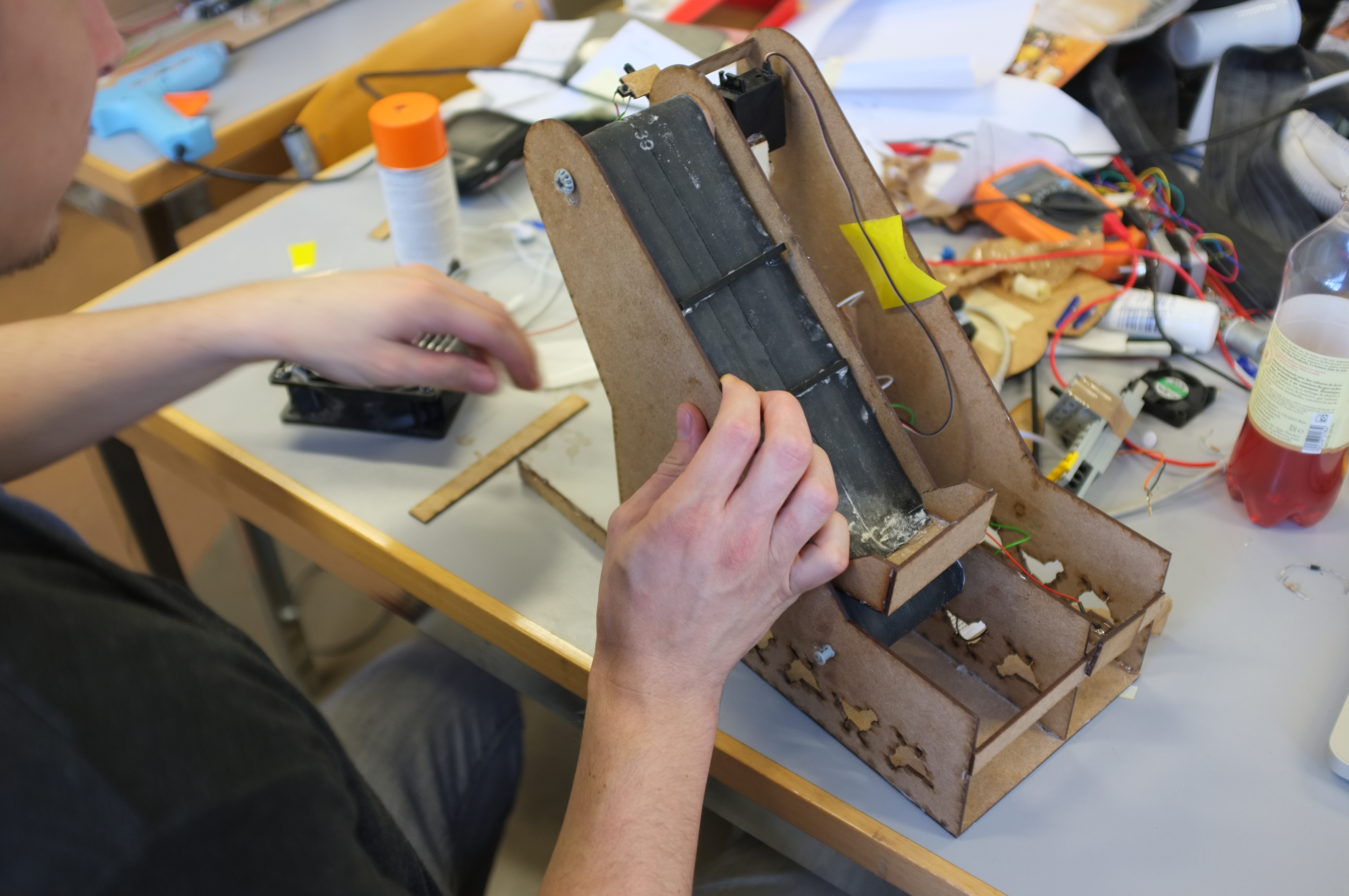
 Das Förderband besteht aus einem alten Vahrradschlauch
Das Förderband besteht aus einem alten Vahrradschlauch

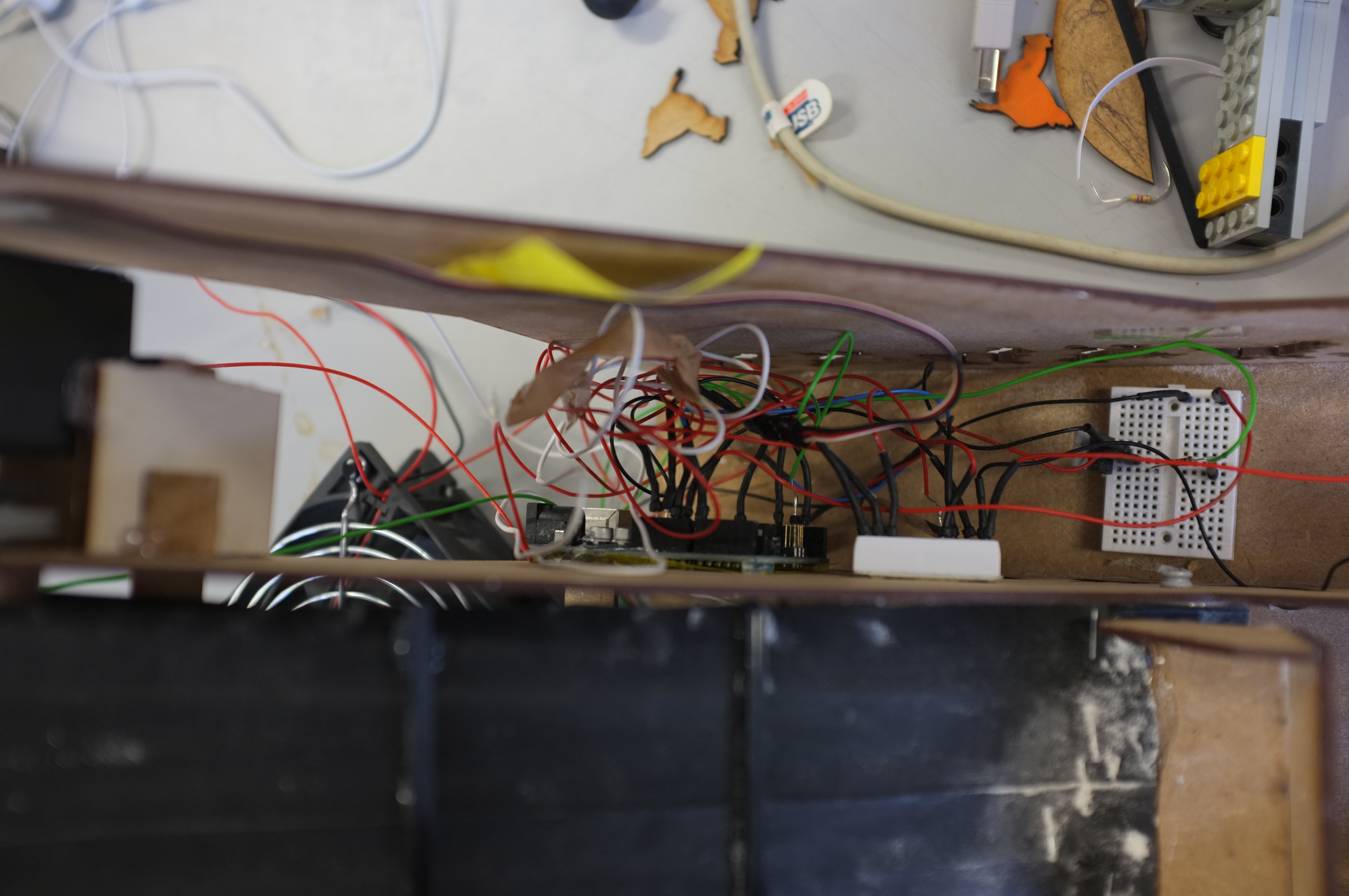 Angeschlossener Lüfter und aufgeräumte Elektronik in der Innenwand.
Angeschlossener Lüfter und aufgeräumte Elektronik in der Innenwand.

 Das mit Mehl Beladene Förderband. Hier funktionierte noch alles perfekt.
Das mit Mehl Beladene Förderband. Hier funktionierte noch alles perfekt.

 Zuviel Mehl gibt eine Sauerei... und beschädigt Elektronik.
Unsere Maschine lief immer einwandfrei. Leider war die Mehlbelastung gegen den Schluss zu hoch, was unsere Maschine in die Knie zwang. Das Blöde war, das unsere kleine Rampe zum wichtigsten Zeitpunkt streikte, nähmlich beim letzten Druchgang; alle Maschinen vollbrachten ihre Arbeit, nur unsere streikte. Tja, shit happens. Dafür war es nachher kein grosses Problem, die kaputte Maschine auseinanderzureissen und in ihre Einzelteile zu zerlegen.
Dar Film für "Der Lauf der Dinge V2" kann hier angeschaut werden:
Unser Arduino-Code
Zuviel Mehl gibt eine Sauerei... und beschädigt Elektronik.
Unsere Maschine lief immer einwandfrei. Leider war die Mehlbelastung gegen den Schluss zu hoch, was unsere Maschine in die Knie zwang. Das Blöde war, das unsere kleine Rampe zum wichtigsten Zeitpunkt streikte, nähmlich beim letzten Druchgang; alle Maschinen vollbrachten ihre Arbeit, nur unsere streikte. Tja, shit happens. Dafür war es nachher kein grosses Problem, die kaputte Maschine auseinanderzureissen und in ihre Einzelteile zu zerlegen.
Dar Film für "Der Lauf der Dinge V2" kann hier angeschaut werden:
Unser Arduino-Code
<pre>#include <Servo.h>
Servo myServo;
#define SEN_1 0
#define PIN_1 3
#define PIN_2 2
#define PIN_4 5
#define SERVO_PIN 9
#define IN_PIN 0
int sig = 400;
boolean pushbutton;
boolean pushbutton2;
boolean venti;
void setup ()
{
Serial.begin(9600);
pinMode(PIN_1, INPUT);
digitalWrite(PIN_1, HIGH);
pinMode(PIN_2, INPUT);
digitalWrite(PIN_2, HIGH);
pinMode(PIN_4, OUTPUT);
digitalWrite(PIN_4, HIGH); // ventilator
}
void loop ()
{
Serial.println(analogRead(SEN_1));
if(digitalRead(PIN_2) == LOW) {
pushbutton = true;
}
if(digitalRead(PIN_1) == LOW) {
pushbutton = false;
pushbutton2 = true;
}
if(pushbutton == true)
{
myServo.attach(SERVO_PIN);
myServo.write(100);
digitalWrite(PIN_4, HIGH);
}
if(pushbutton == false)
{
myServo.detach();
delay(500);
}
//SENSOR
//if(pusbutton(PIN_1) == sig) {
//venti = true;
//}
/*
if(pushbutton2 == true)
{
digitalWrite(PIN_4, HIGH);
delay(10000);
digitalWrite(PIN_4, LOW);
venti = false;
pushbutton2 = false;
}*/
}