5. Dezember 2011
Kalibrierung (horizontale Lage) Auf die drei Achsen wirken folgende Kräfte: X=0g, Y=0g, Z=1g $3F = 64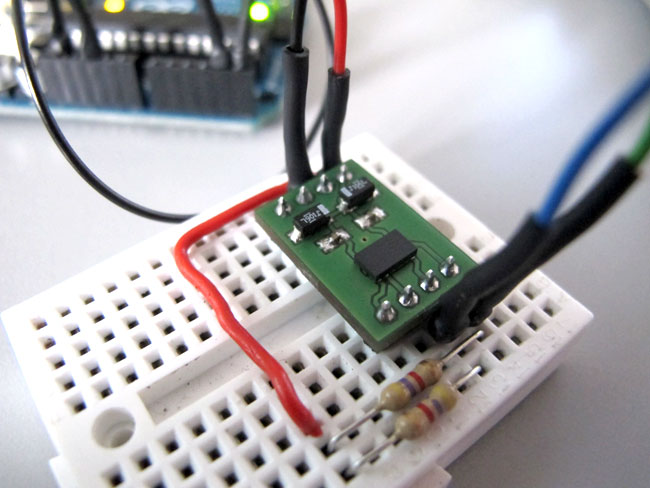
import processing.serial.*; // Import the Processing Serial Library for communicating with arduino
Serial myPort; // The used Serial Port
int xVal,yVal,zVal;
int xPosition;
void setup()
{
background(0);
size(500, 500);
println(Serial.list()); // Prints the list of serial available devices (Arduino should be on top of the list)
myPort = new Serial(this, Serial.list()[0], 9600); // Open a new port and connect with Arduino at 9600 baud
}
void draw()
{
if(xPosition>=width)
{
xPosition = 0;
background(0);
}else{
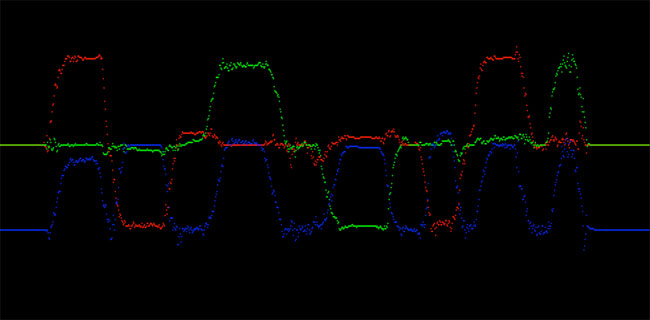
stroke(255,0,0);
strokeWeight(3);
point(xPosition,xVal+height/2);
stroke(0,255,0);
strokeWeight(3);
point(xPosition,yVal+height/2);
stroke(0,0,255);
strokeWeight(3);
point(xPosition,zVal+height/2);
xPosition++;
}
println(xVal +"\t"+yVal +"\t"+zVal);
}
void serialEvent(Serial myPort) // Is called everytime there is new data to read
{
if (myPort.available() > 0)
{
String completeString = myPort.readStringUntil(10); // Read the Serial port until there is a linefeed/carriage return
if (completeString != null) // If there is valid data insode the String
{
trim(completeString); // Remove whitespace characters at the beginning and end of the string
String seperateValues[] = split(completeString, "\t"); // Split the string everytime a delimiter is received
xVal = int(seperateValues[0]);
yVal = int(seperateValues[1]);
zVal = int(seperateValues[2]);
}
}
}