Animus
ANIMUS
A living wall
Marco Ehrenmann, Felix Stricker, Simon Gwinner, David Wyssen, Florian Herzog, Martin Dusek, Sarard Widmaier, Jonas Scheiwiller
Project Documentation
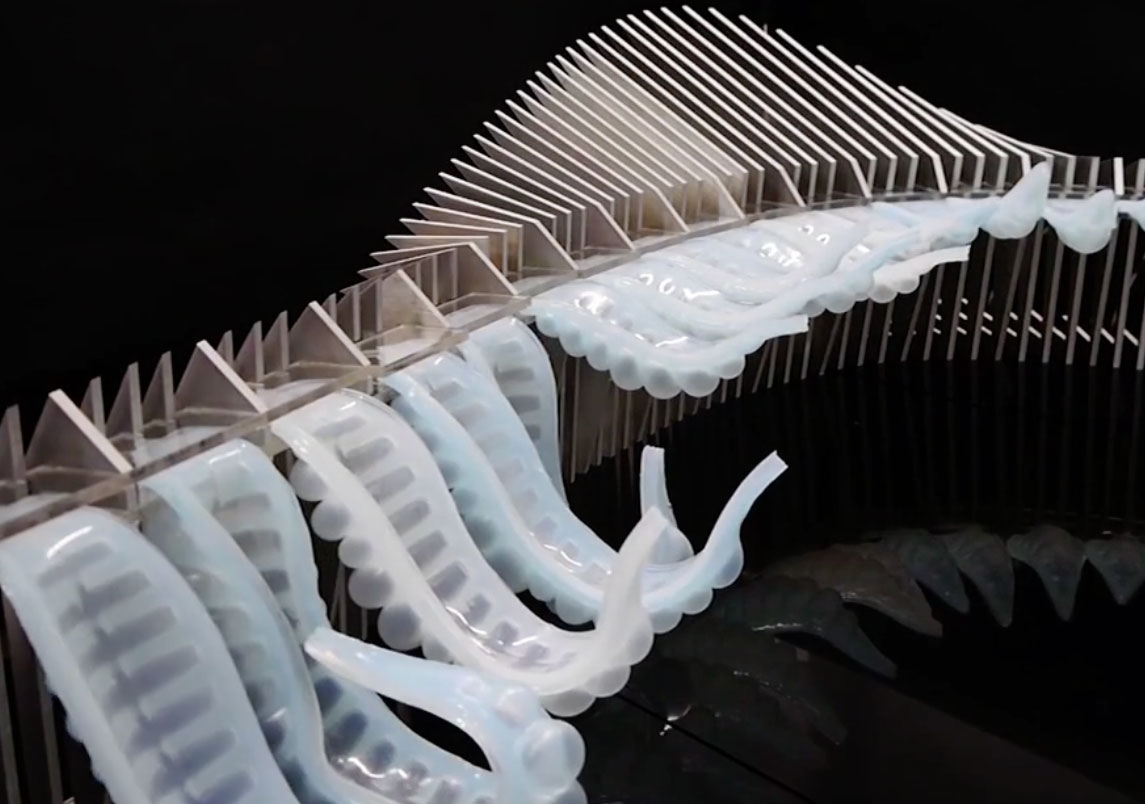
Based upon the initial idea to build a wall with the ability to grasp objects with silicon tentacles (Fig. 1) we further developed our idea to build structures which in the end would be applicable in an architectural context.

This and some specific research done in this field led us to a lot of different ideas. Including public transportation shelters with dynamic roofs reacting on light and rain or the design of specialized roofs in concert halls to improve the acoustics.
Inspiration
 Quelle: http://www.fastcolabs.com/3037993/furl-the-eeg-responsive-soft-robotics-future-of-architecture
Quelle: http://www.fastcolabs.com/3037993/furl-the-eeg-responsive-soft-robotics-future-of-architecture
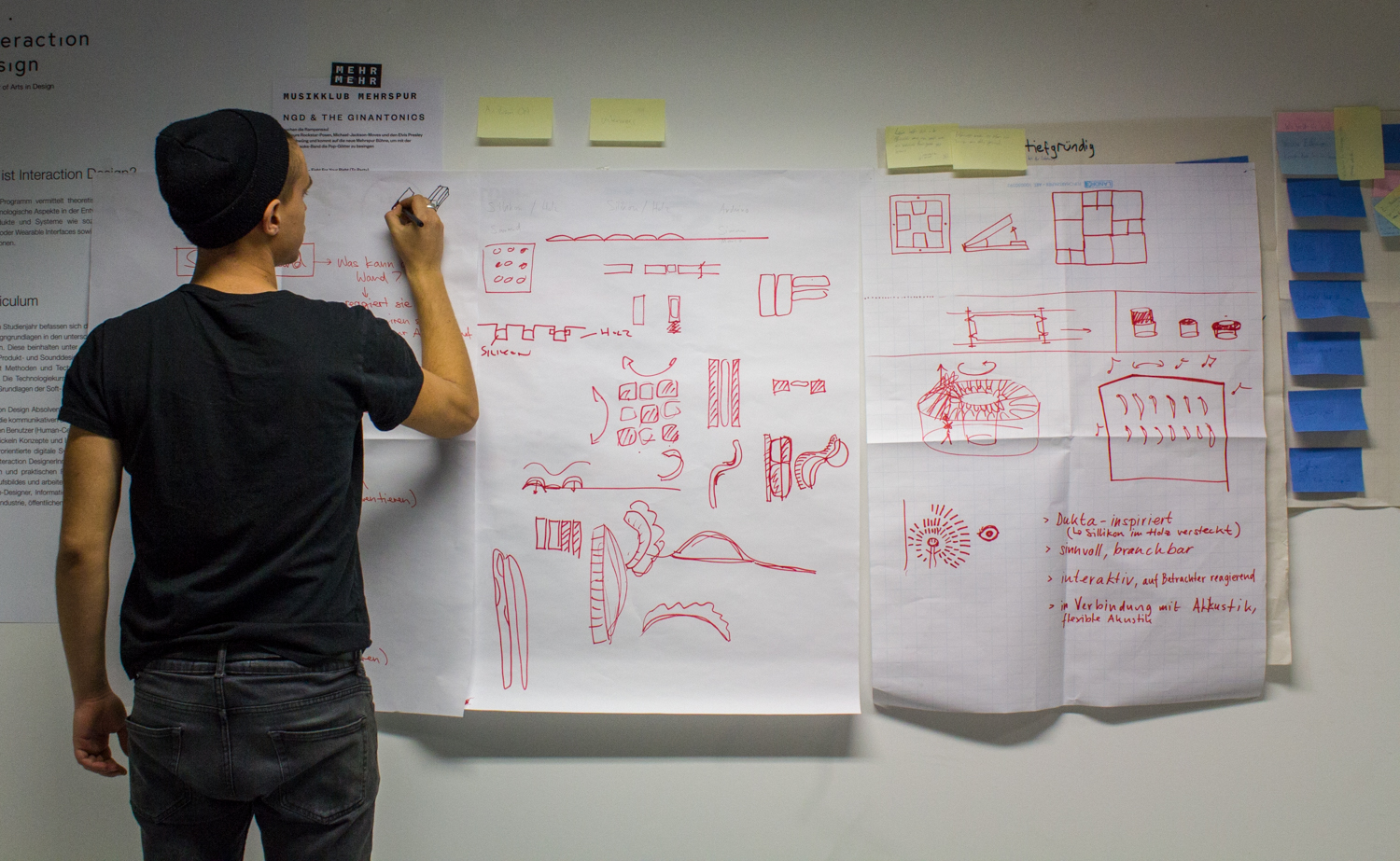
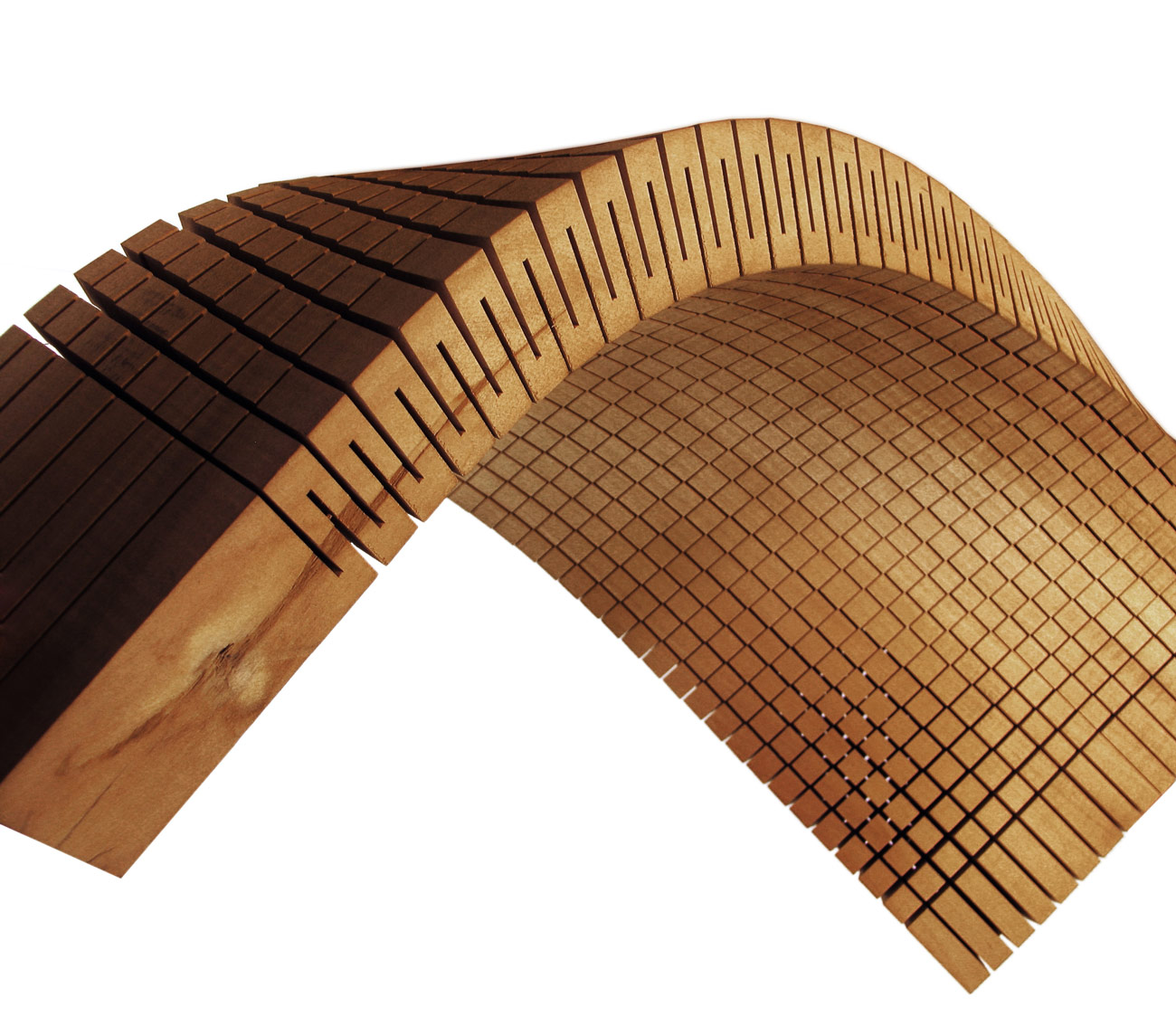
After a deep brainstorming and some drawings we dropped the 'grasping-wall-idea' in favour of a structure combining silicon and wood.
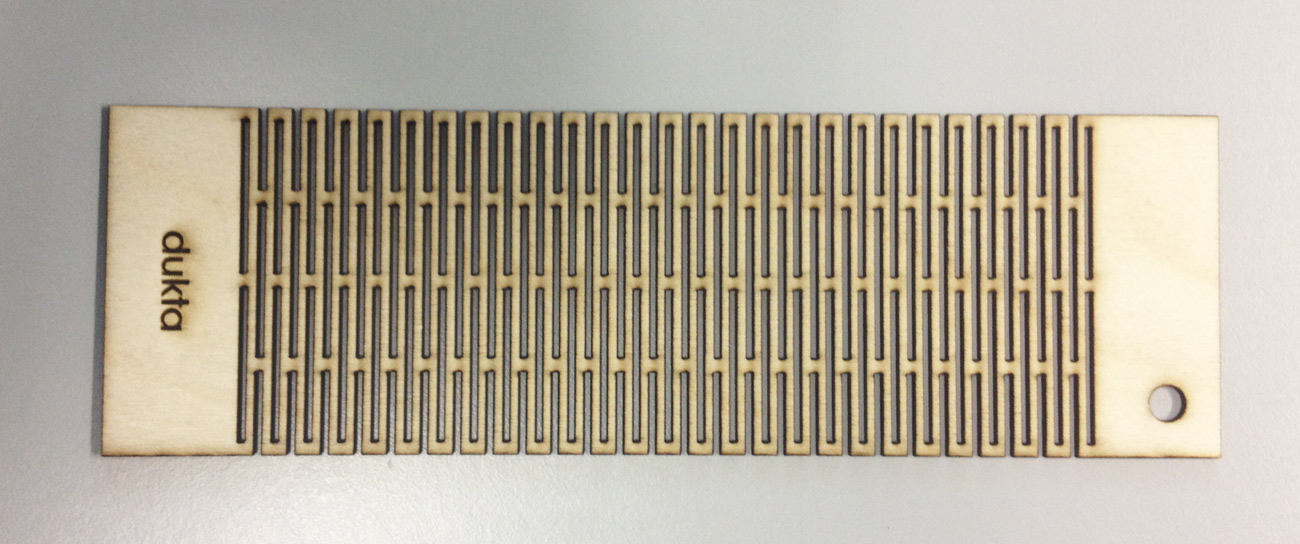
Wood as a more natural component with a rather comfortable feel in comparison to silicon should be used as backbone structure moved by soft actuators made of silicon. Because wood is normally quite static and inflexible we wanted to use 'dukta' wood.
>http://www.dukta.com/en/
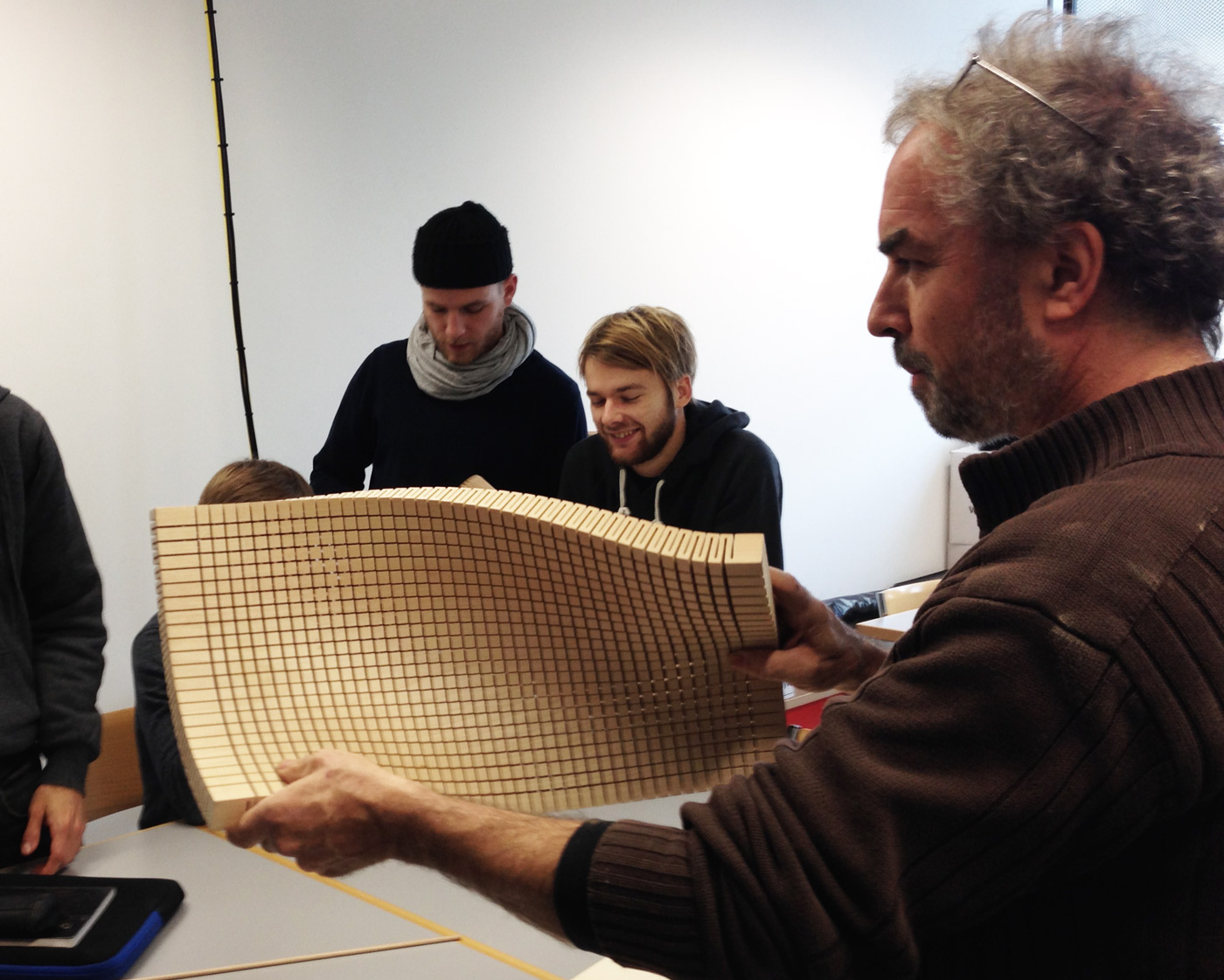
Fortunately we had the chance to meet one of the inventors of 'dukta' at the very same day. Serge Lunin kindly showed us different products and fields where dukta could be applied.
 Quelle: www.gewerbemuseum.ch
First Tests & Prototypes
Quelle: www.gewerbemuseum.ch
First Tests & Prototypes
After the inital phase we started to create our first tests with the aim to create a surface with the ability to bend into multiple directions via inflating different pneumatic actuators.

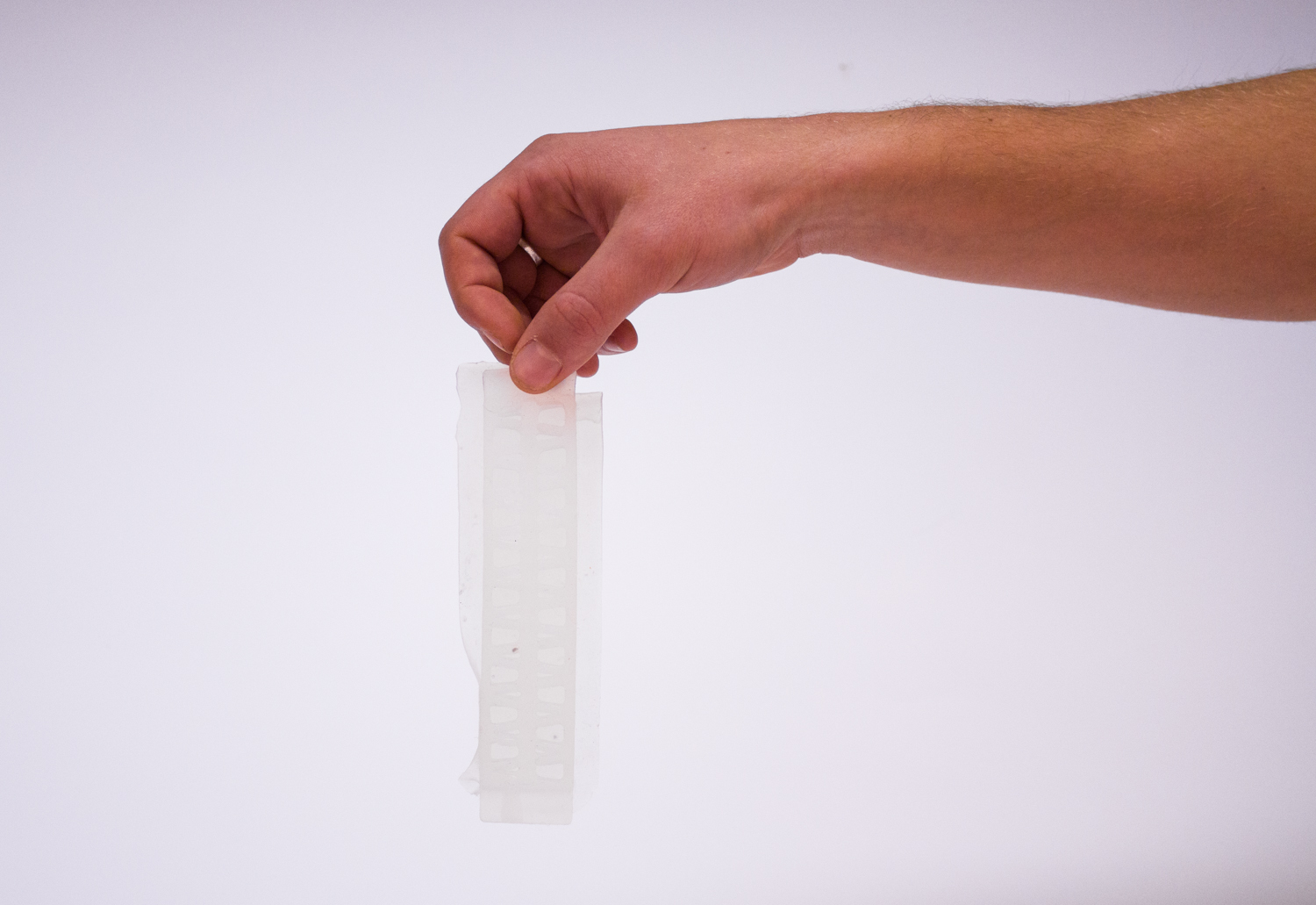
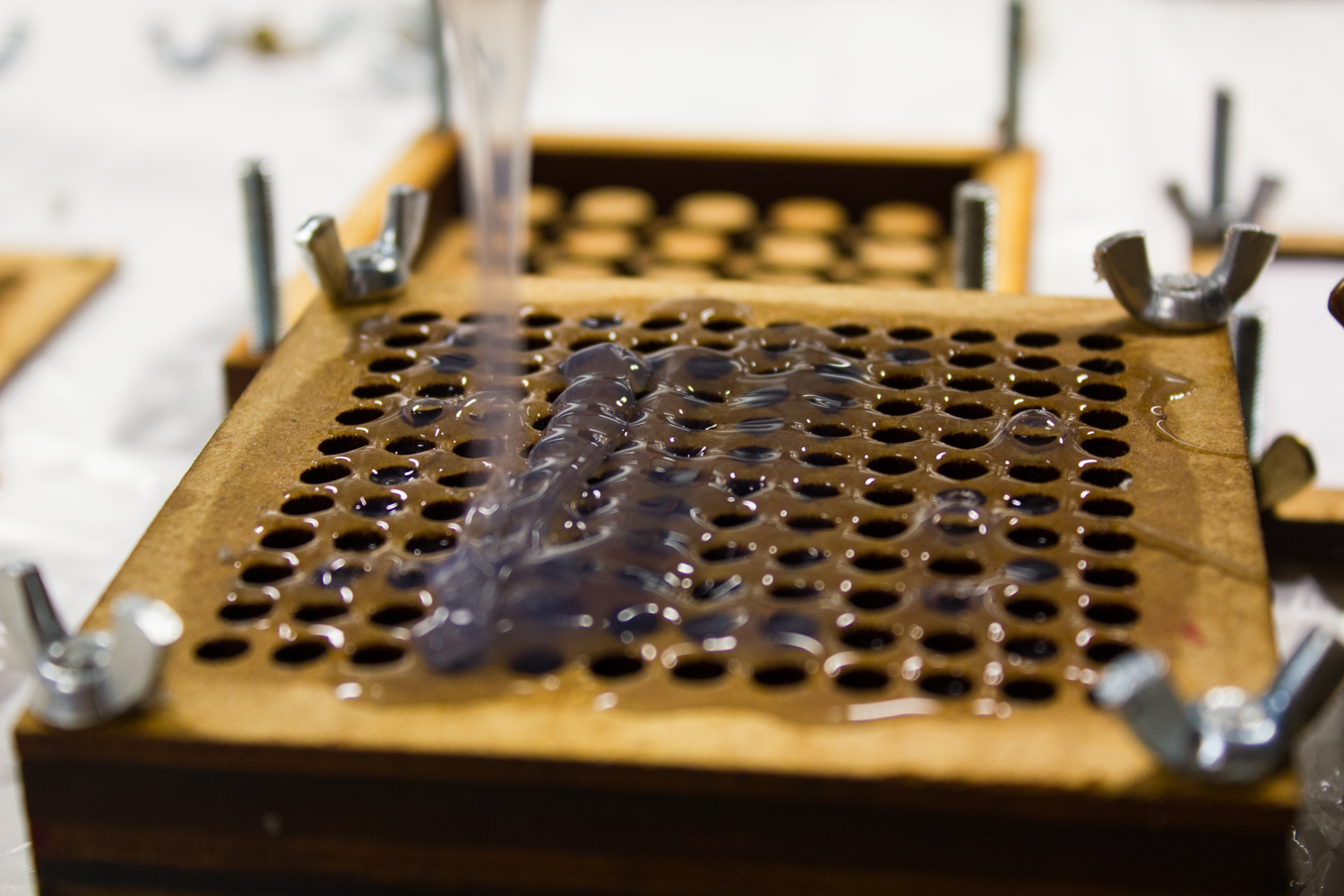
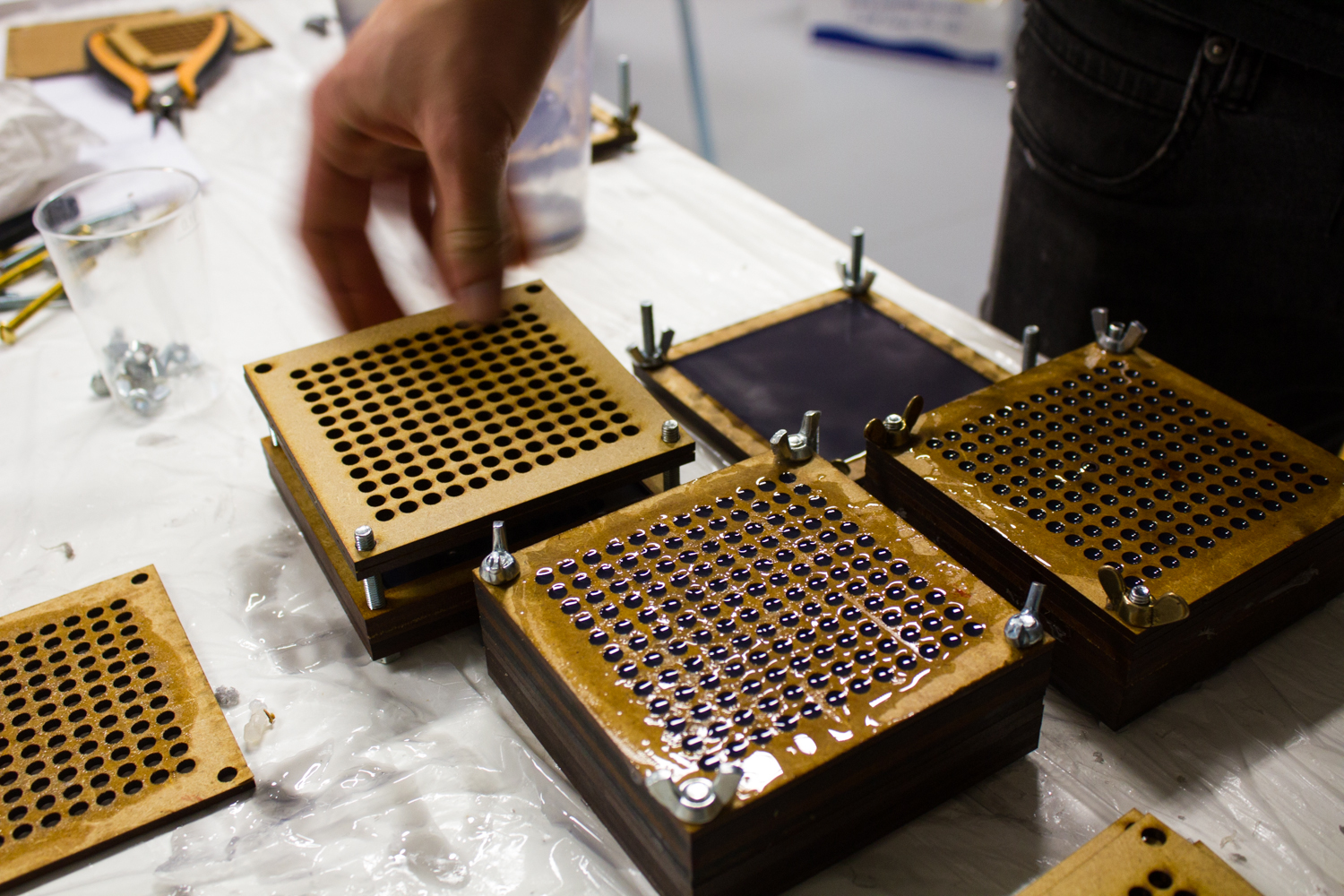
Pouring silicone.
Stretch test.

Some of the molds.

Possible surface to achieve a 'multi-bendable' surface. Actuators arranged in different directions could make this possible.

Creating one of the first surfaces which is tangibly interesting. A surface that makes you want to touch it.


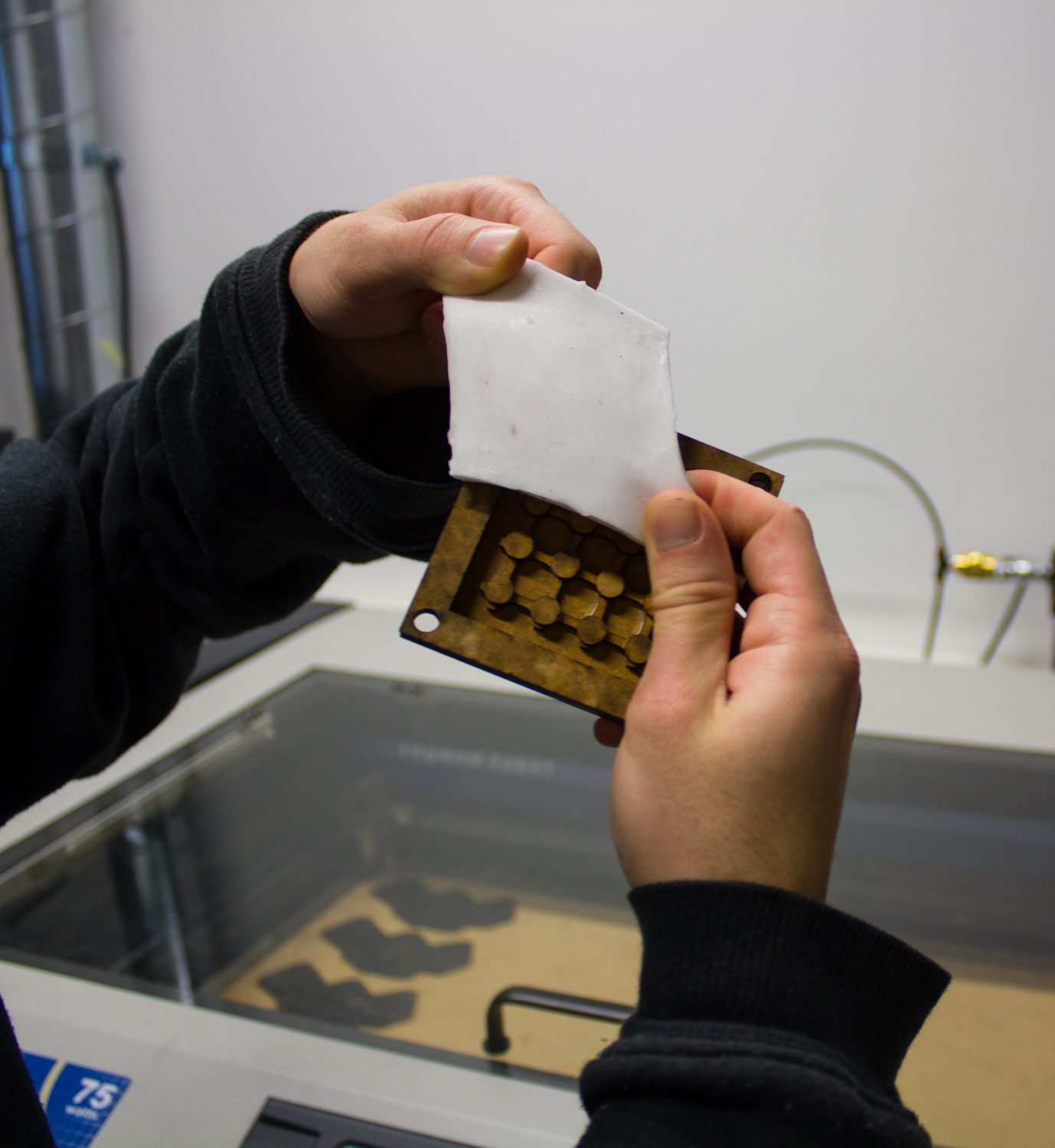
Further prototypes. This one with the aim to create a less regular and geometric shape and the attempt to combine silicone with wood which feels more natural. Unfortunately these two materials don't attach to each other really well. At this point we dropped the idea to work with wood – at least for the moment.

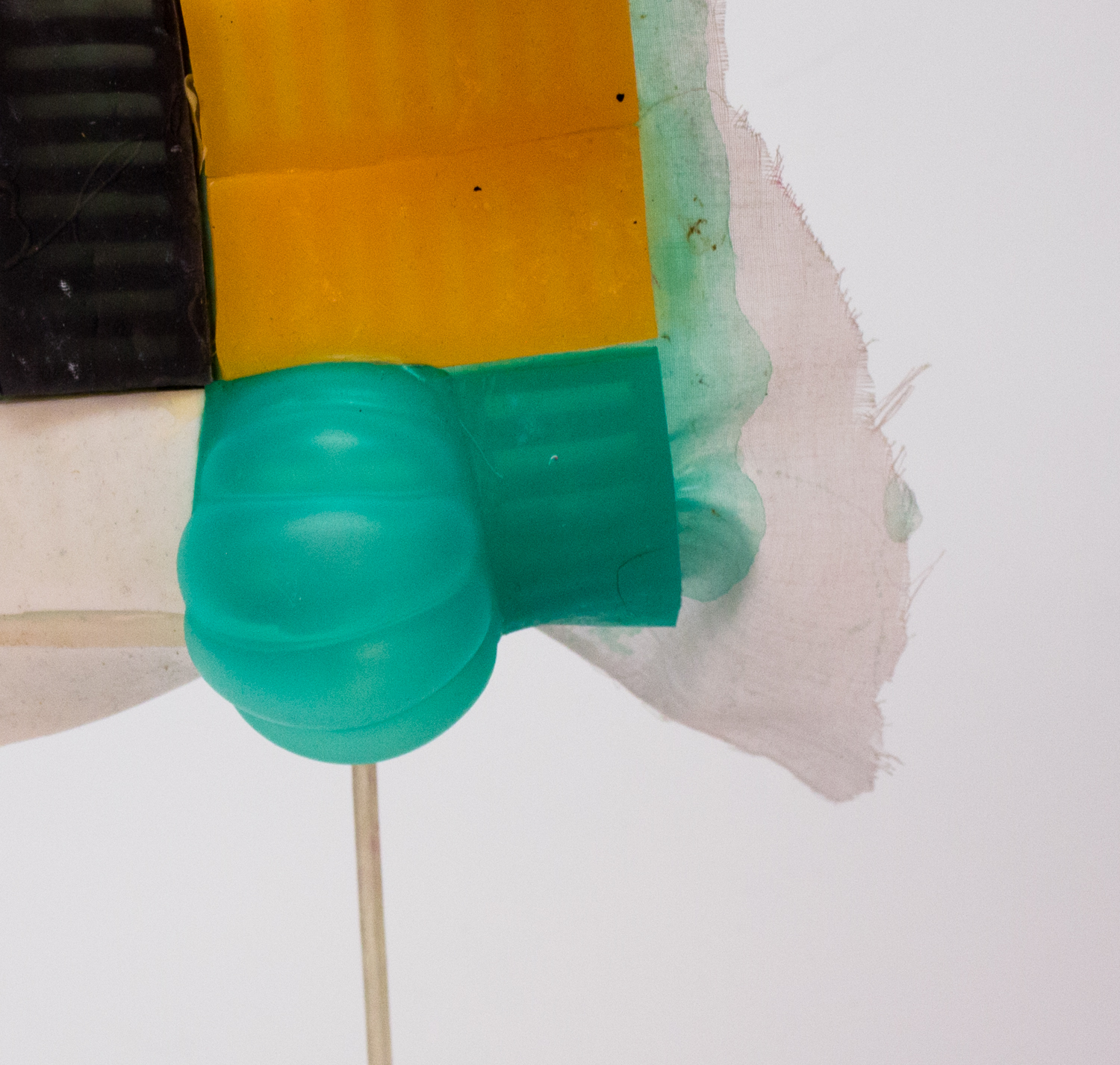
First experiments with light and translucence of differently coloured silicone objects. We definitely kept this idea in the back of our heads.

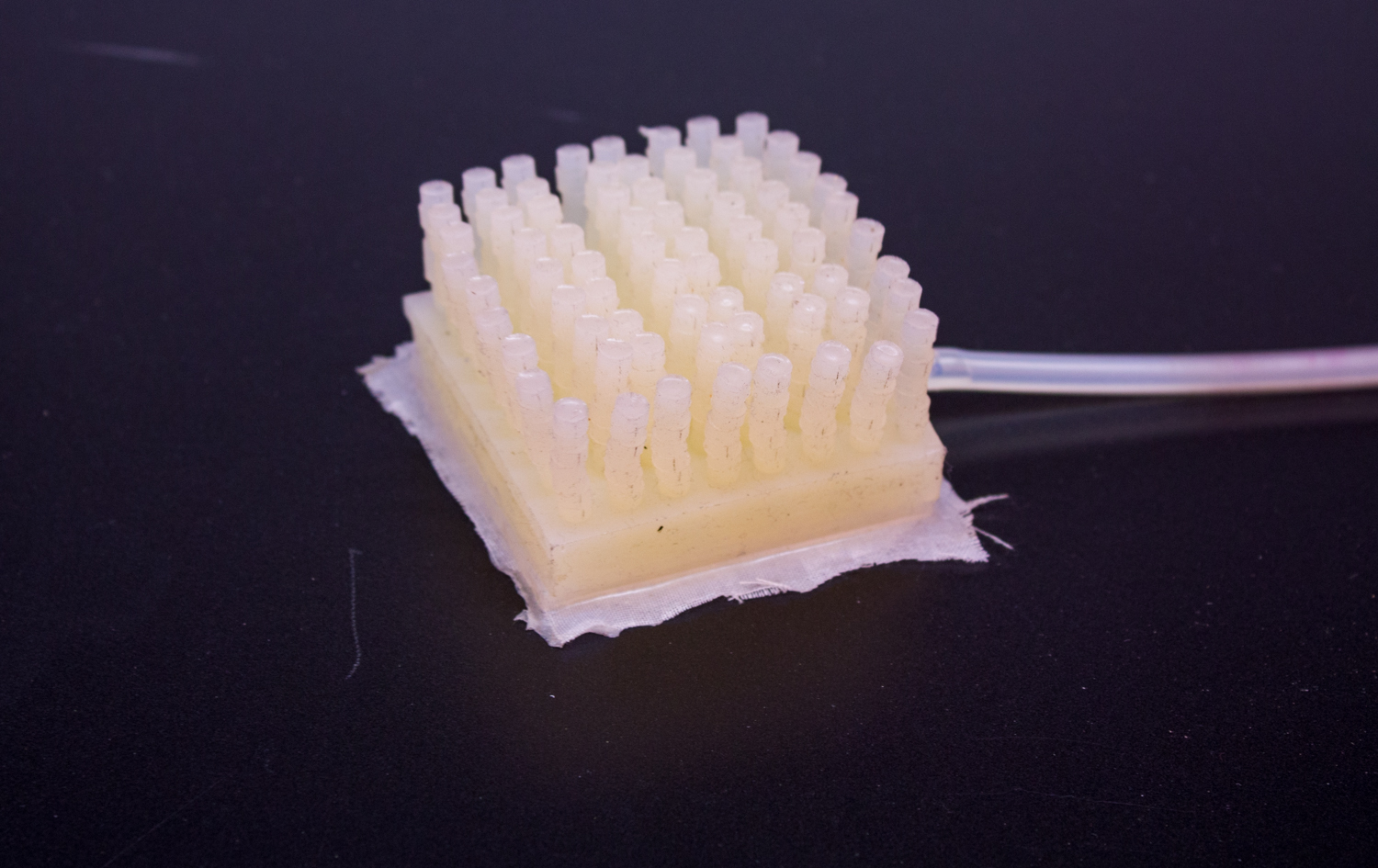
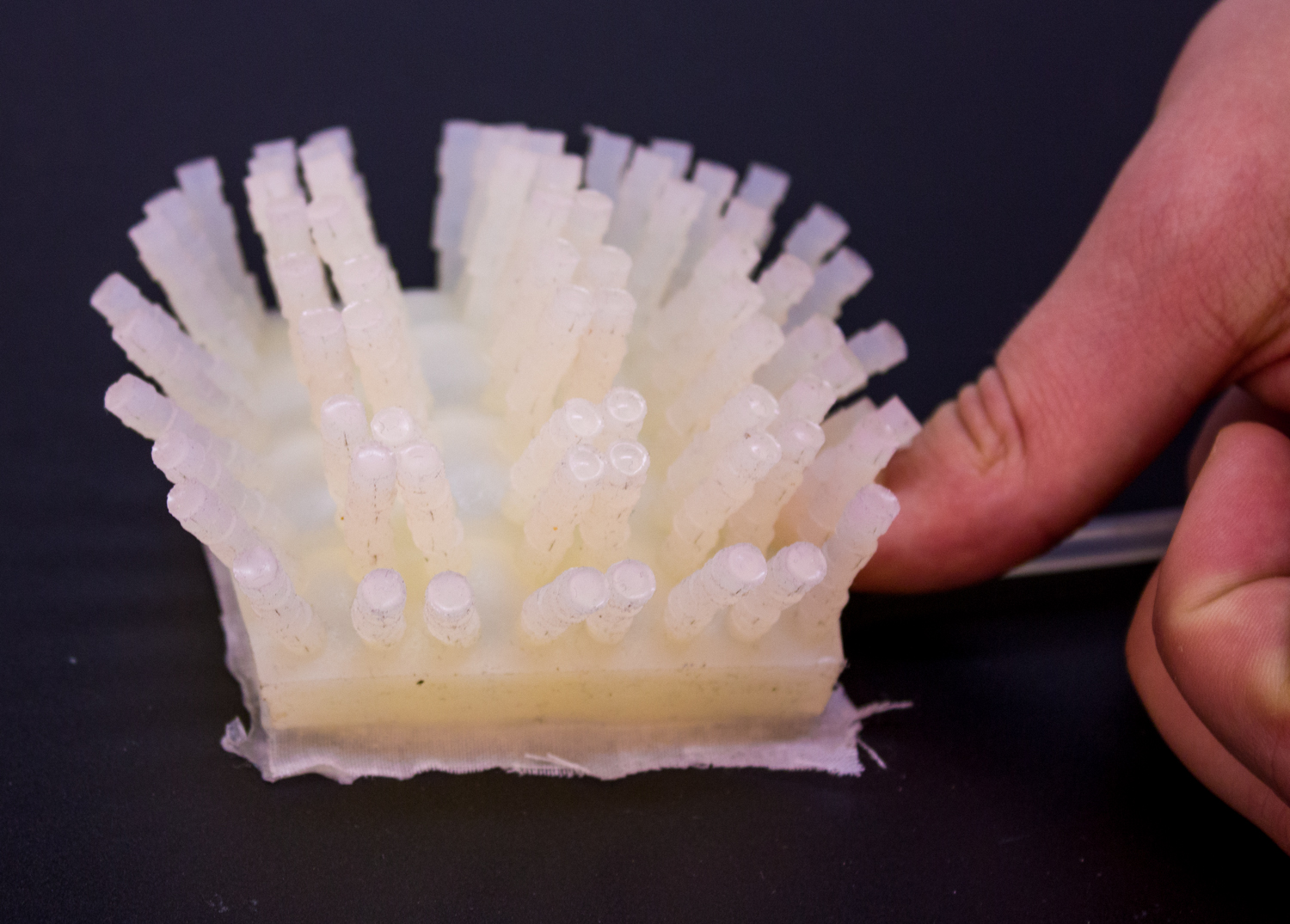
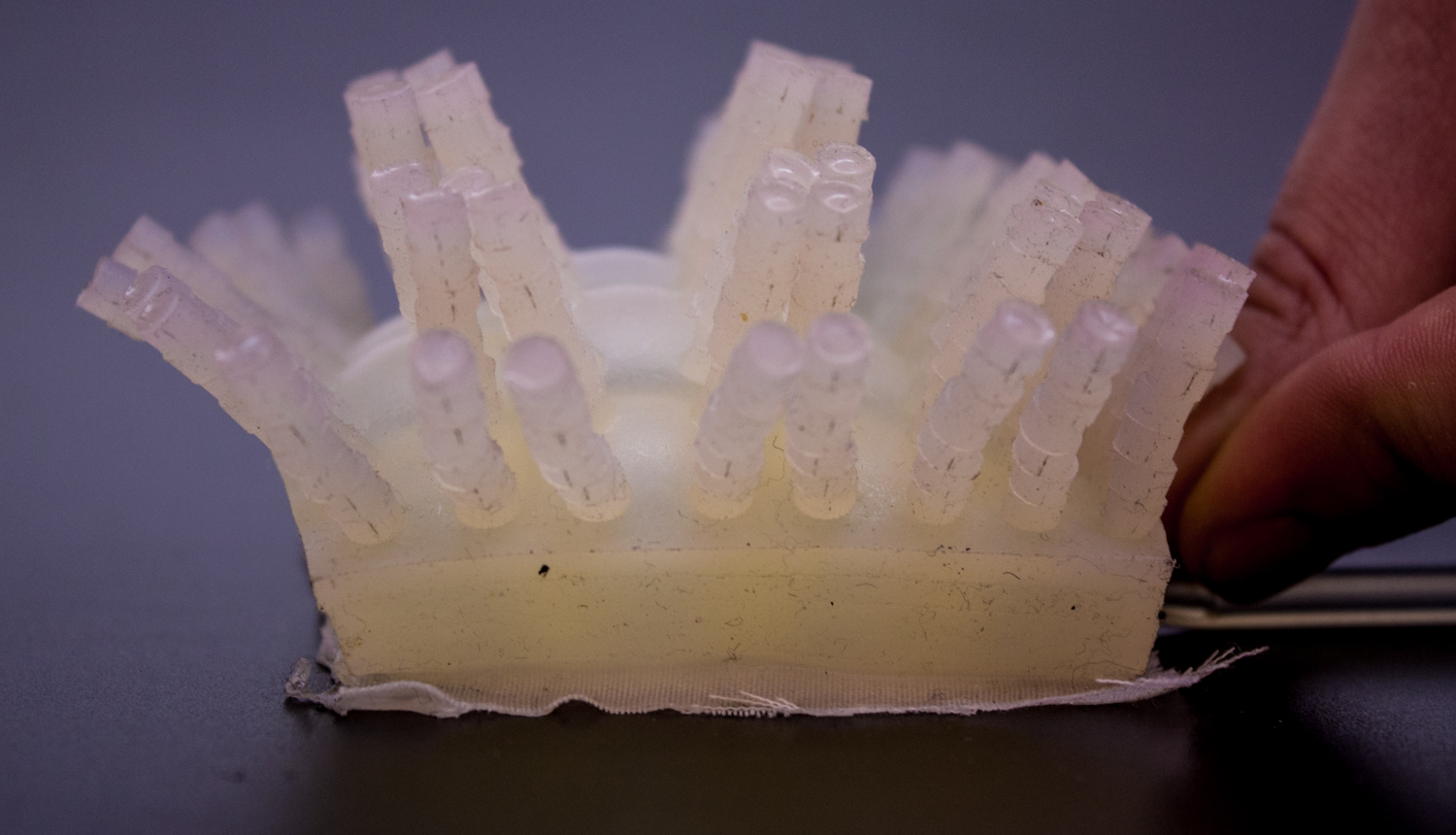
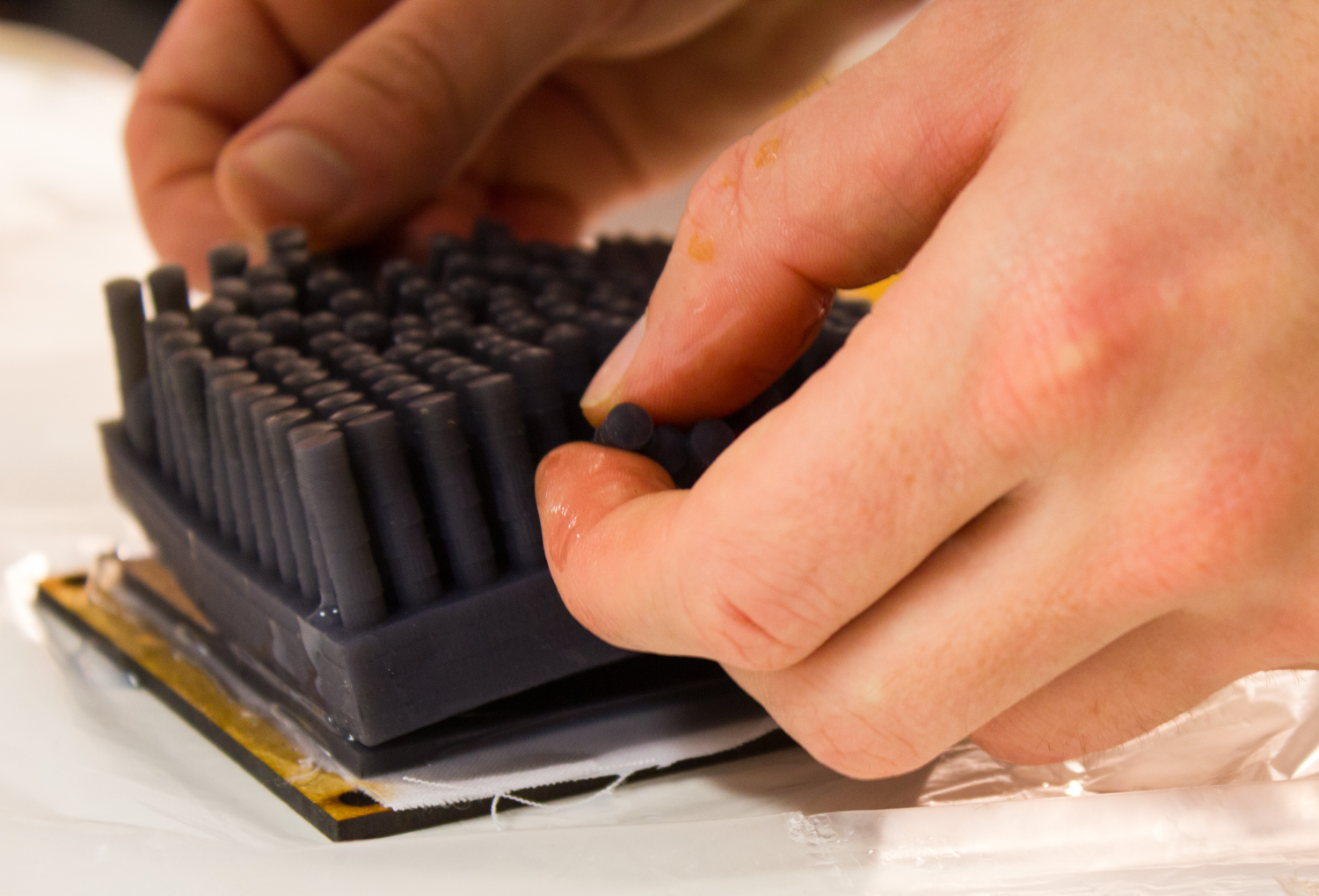
Then we came up with the idea to further experiment with a surface that is more interesting with regard to tangency. These 'villi' use the qualities of silicone perfectly and the wiggle even with the slightest touch.
After those steps we decided to build a surface consisting of inflatable 'shag'-elements which invite to be touched – which results in a wobble of the whole structure. The inflating part should be controlled via an input by the viewer. Either by touch- or gesture-control. Our vision was that only parts of the surface in– and deflate really slowly on viewer-input. This may have some similarity with underwater structures like corals, slightly moving in the water current. To further emphasize this similarity we planned to use UV-light (either LEDs or UV-spots) to enlight our 'soft reef'. Preferably we wanted to have the light illuminate our surface from behind, regarding the interesting results from earlier prototypes in combination with light. As an option we also had in mind to even control the light via user/viewer input.
Changing Direction
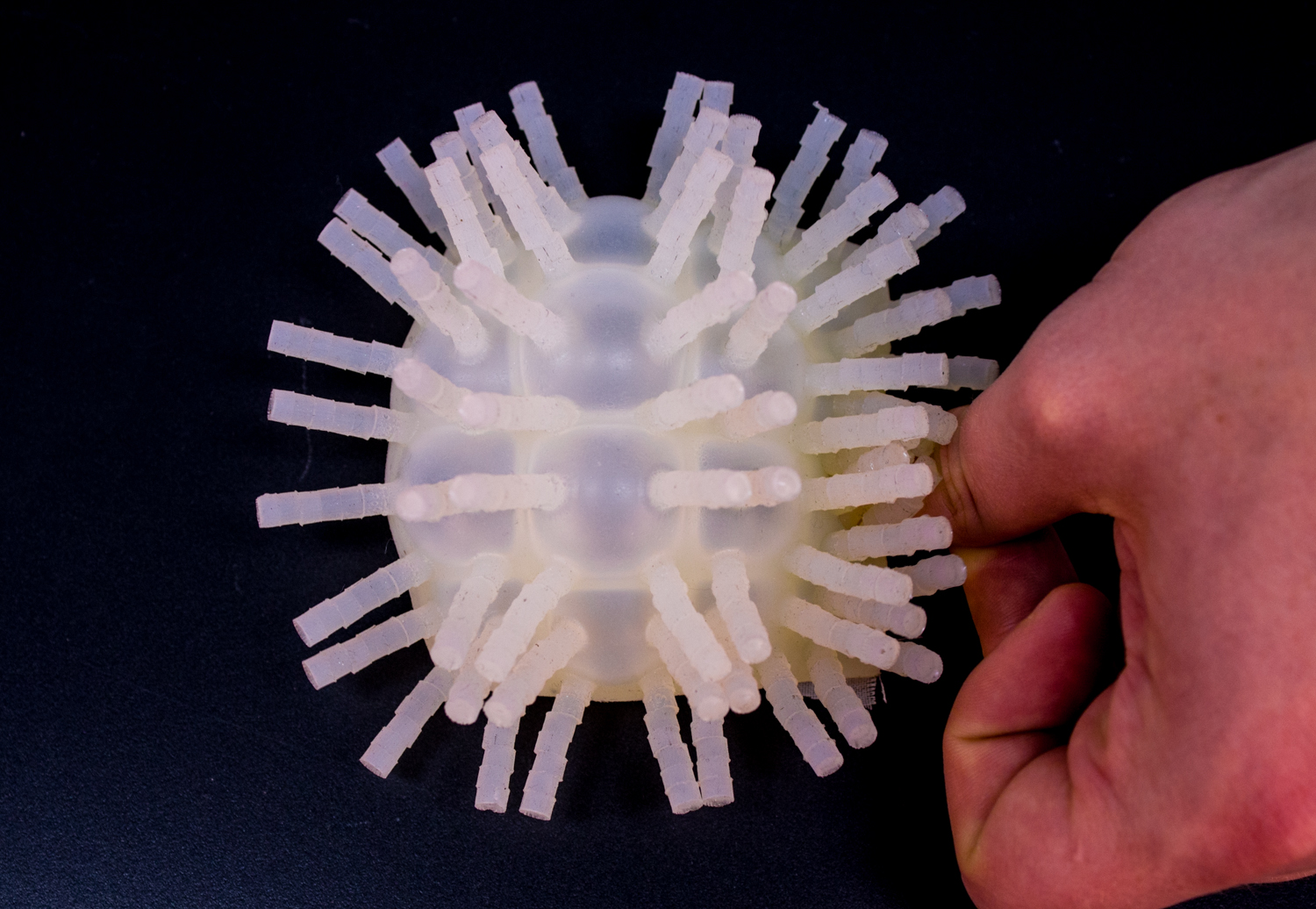
After some reconsiderations and discussions we agreed on one final look of our modular element.
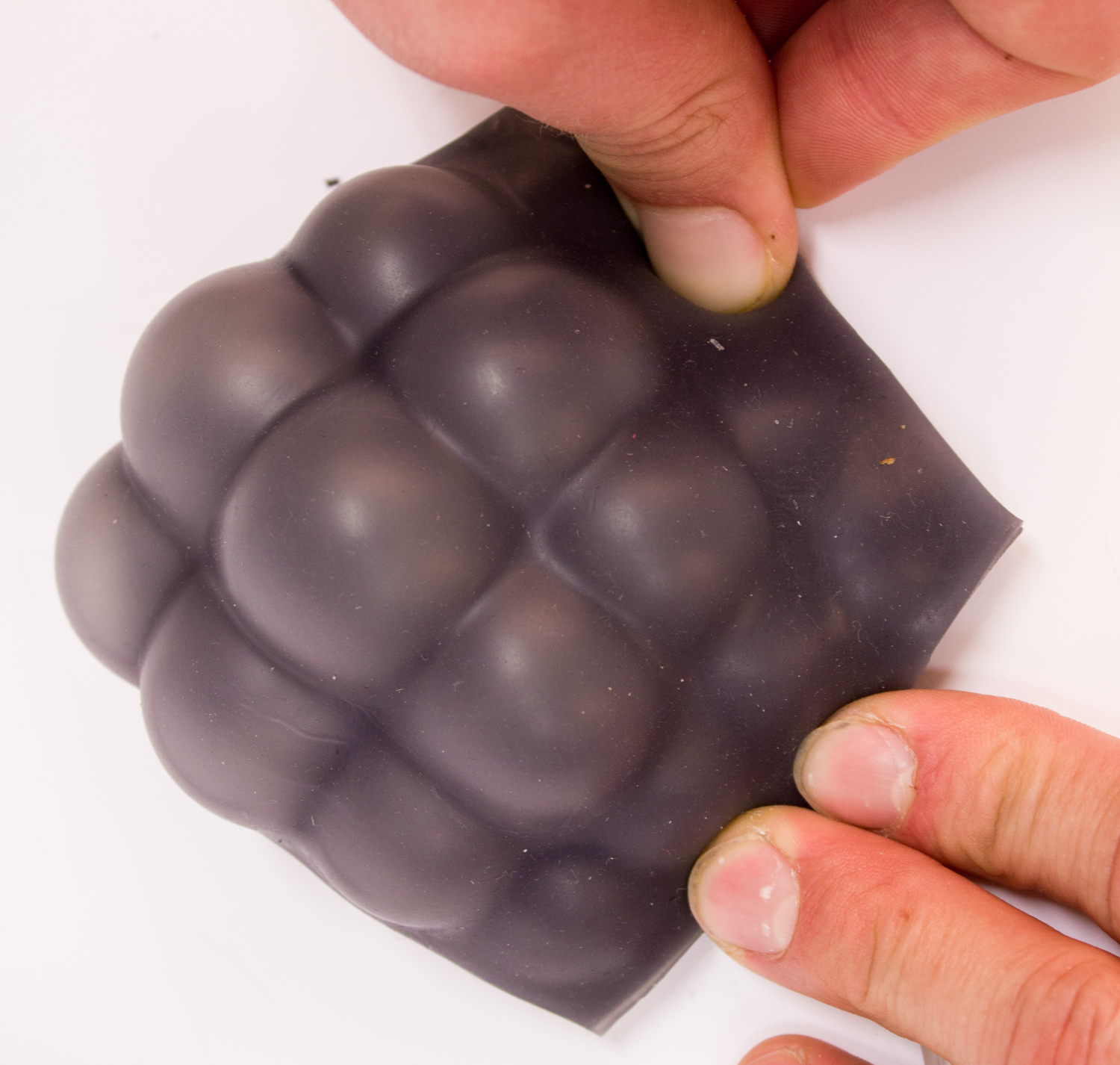
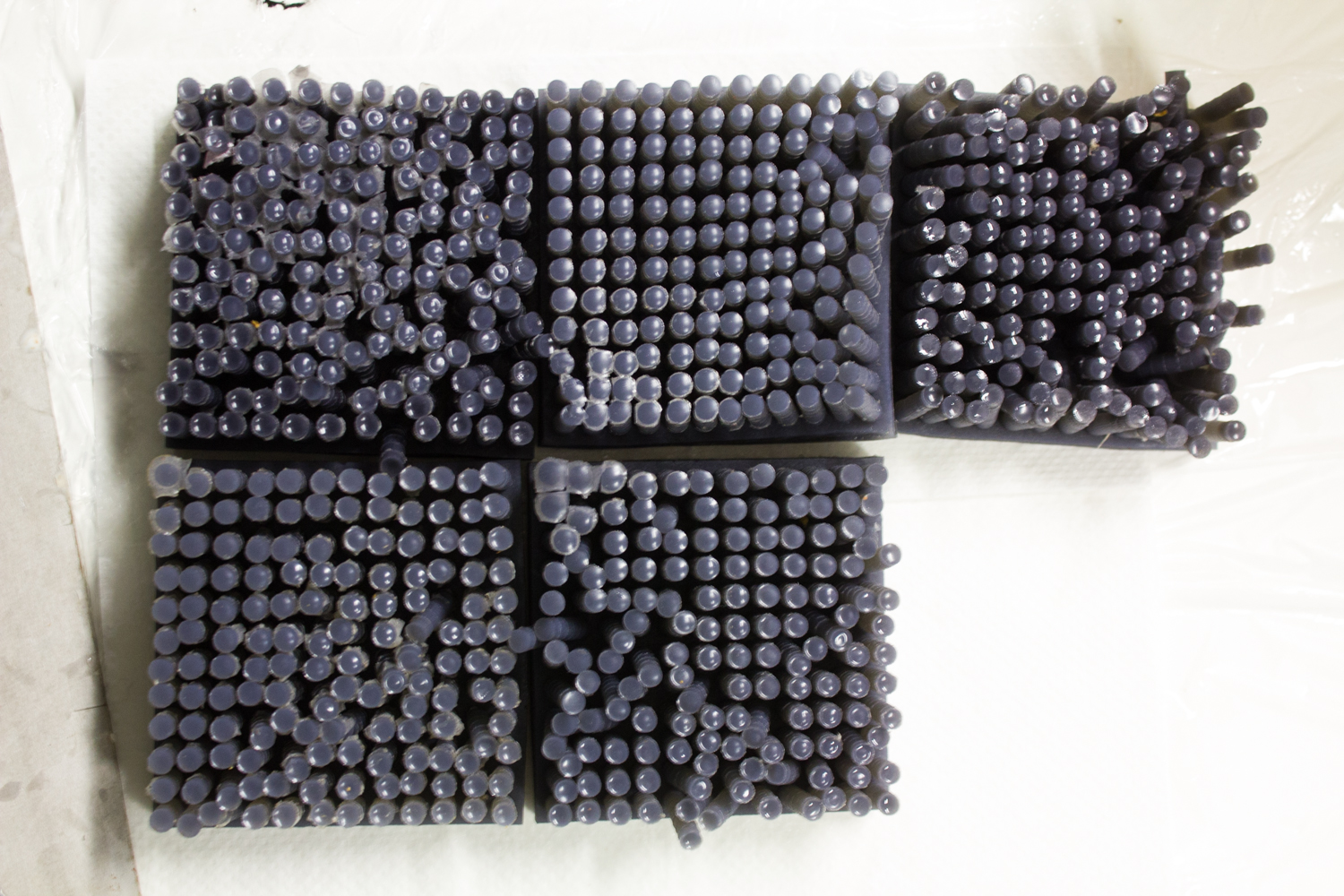
We decided that it should be coloured almost black. The dark elements have the disadvantage, that they are not as translucent as the uncoloured ones. But because we were thinking about abandoning the light idea for the time being, we think black elements result in a nicer look.
We also reconsidered the way our final surface should look like. Instead of having a flat surface we intended to build a more organic surface with differences in height at different spots.
Thoughts about the interaction
We also spent further time to think about the interaction between users and our installation. Because we wanted to bring out the organic part of this installation, we decided to let it breath quietly and regularly as long nobody is interacting. We intended to inflate different actuators and release the air instantly via slow leaks. This generates a breathing pattern.
If somebody steps in and interacts with the installation, we wanted to have our structure stop breathing in the first point. As if the structure was shy and keeping its breath while waiting to see what happens. If the user approaches and finally touches the installation the structure may get accustomed and starts to breath again. This time in a more controlled way, maybe only where the user is touch the structure.
These definite interactions how the structure reacts on direct user input were not yet defined that clearly. Also because we did not know what was possible concerning our sensor-systems. We decided to further proceed with the silicone-pouring and assembling the structure as a priority.
We also made a little video describing the material qualities of silicone in our shape. Especially the wiggling and the extreme flexibility paired with the very alive looking lobes increase the wish to touch the structure and play with it.
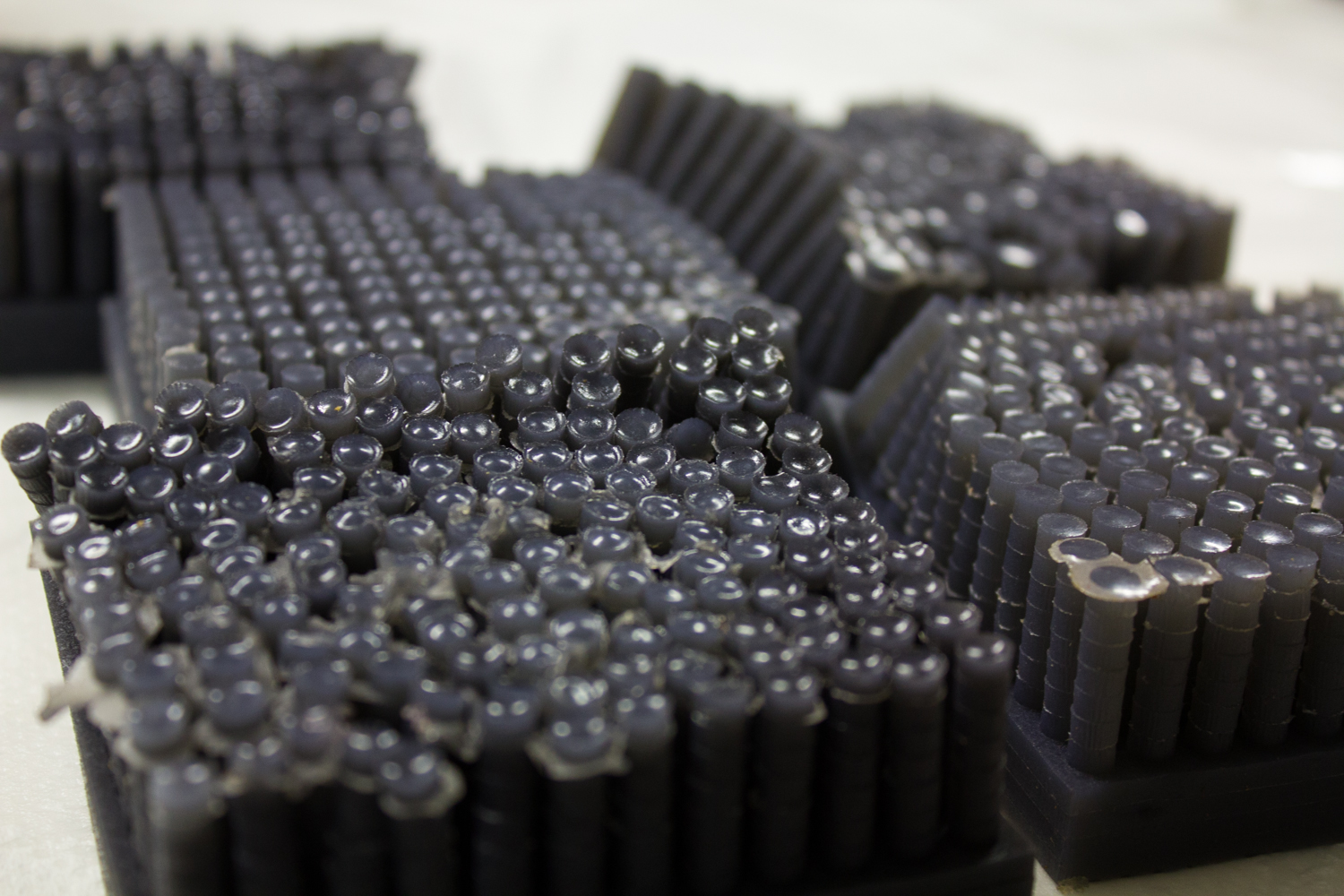
Mass Production
One day later we had produced about 12 pcs of our final modules. We used four molds to pour the silicone and several people worked on them simultaneously. A difficulty remains in disassembling the molds without ripping off the silicone lobes. We also experienced some problems due to damage of the molds resulting from the constant assembling and disassembling. Nonetheless we kept going to produce as many elements as possible in the short remaining time.

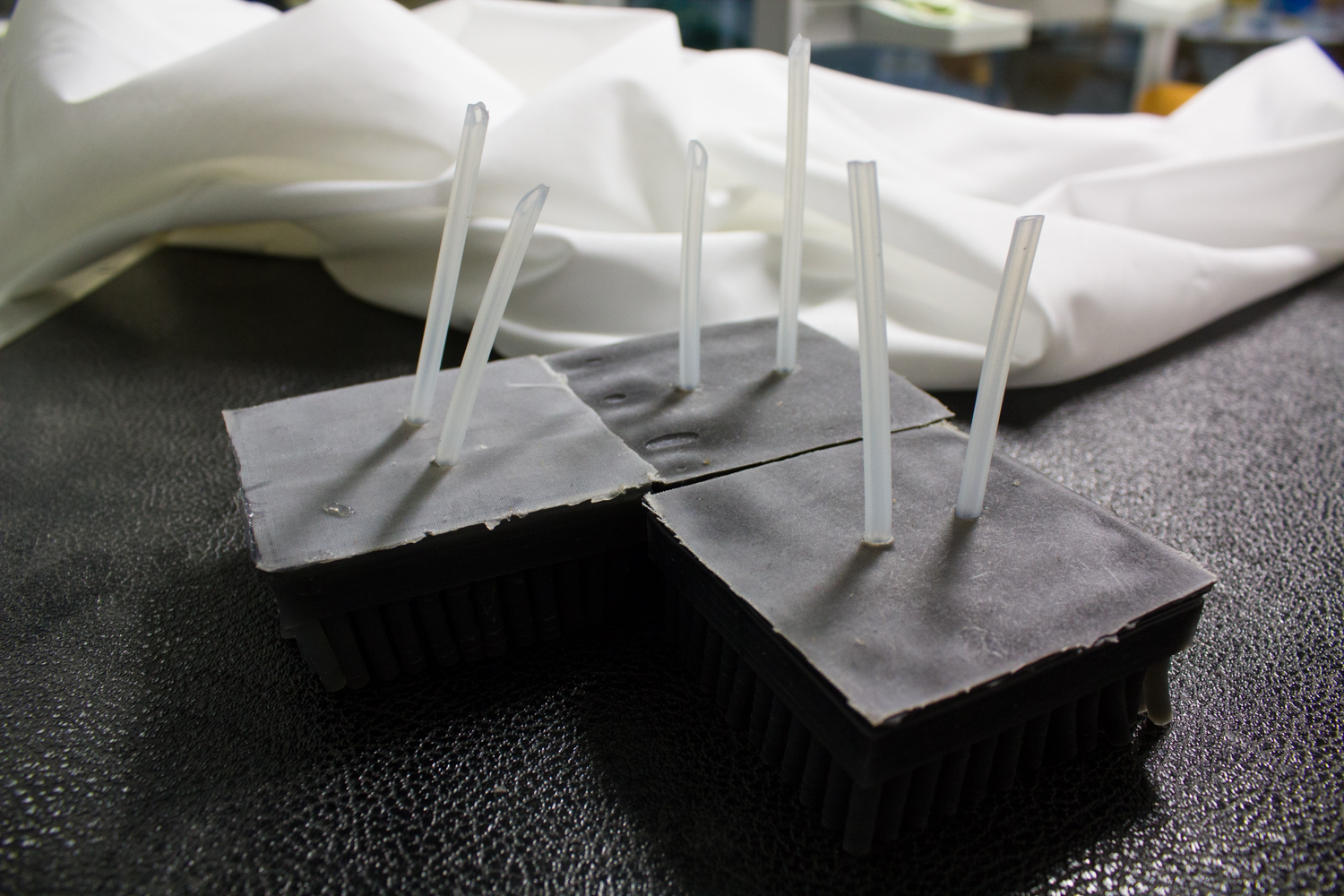
We used two tubes to inflate and deflate our moduls automatically.

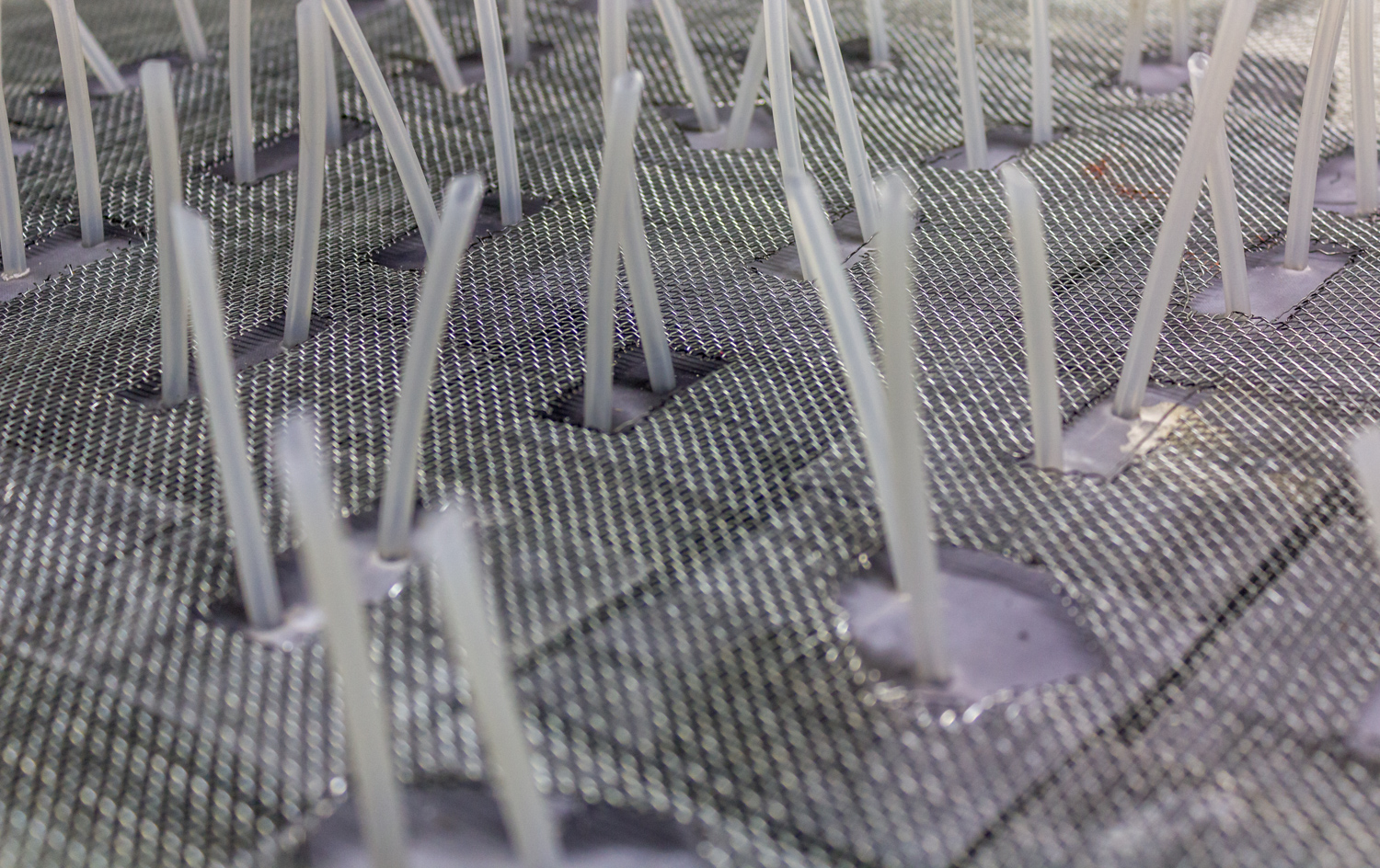
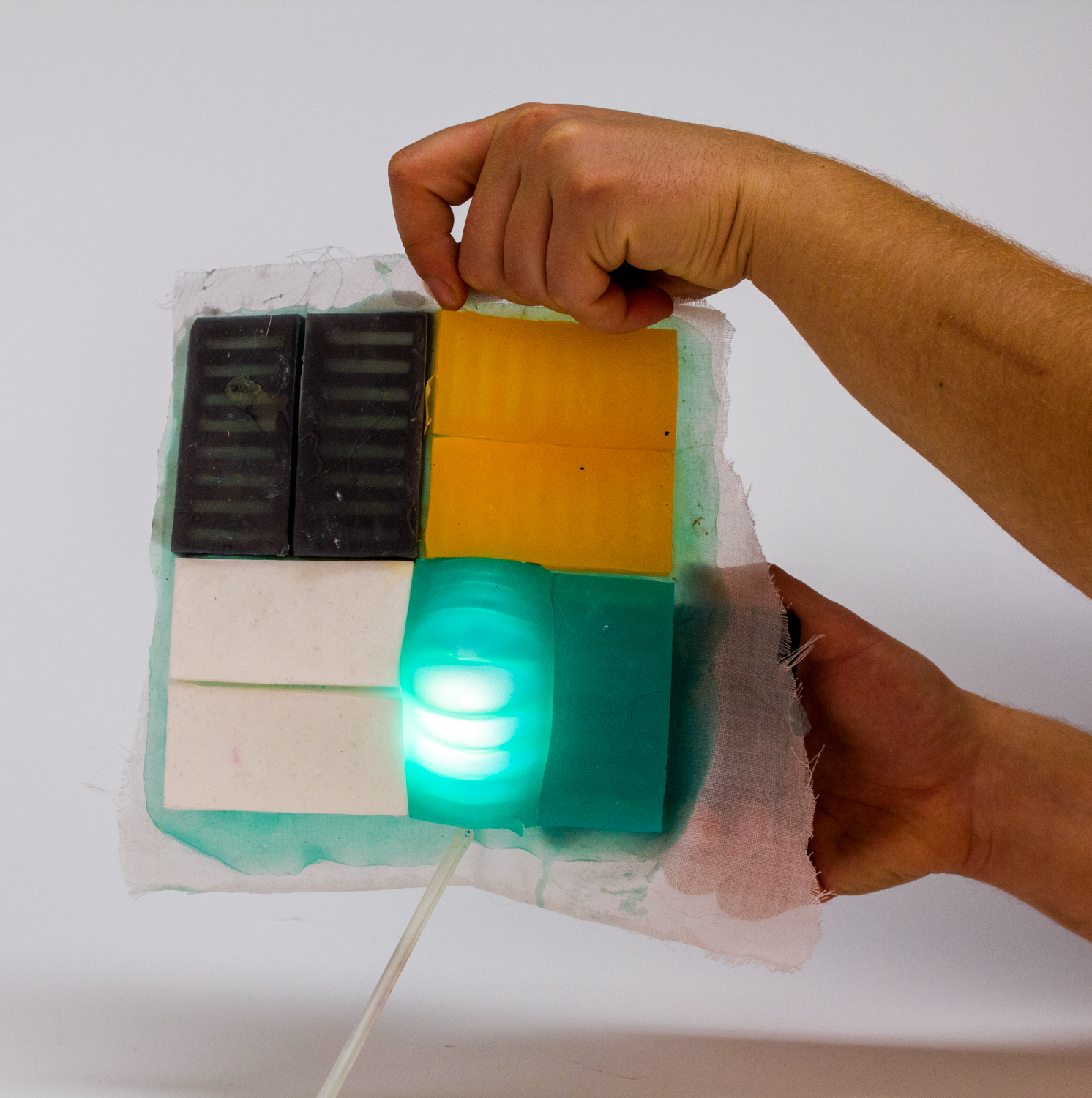
The last task was to compile all elements to one surface. For this, we used a flexible metalfabric, cut small holes for the tubes and sticked them to the surface with silicone. We also build self-running deflation parts out of shrink tubings.
Making it breathe
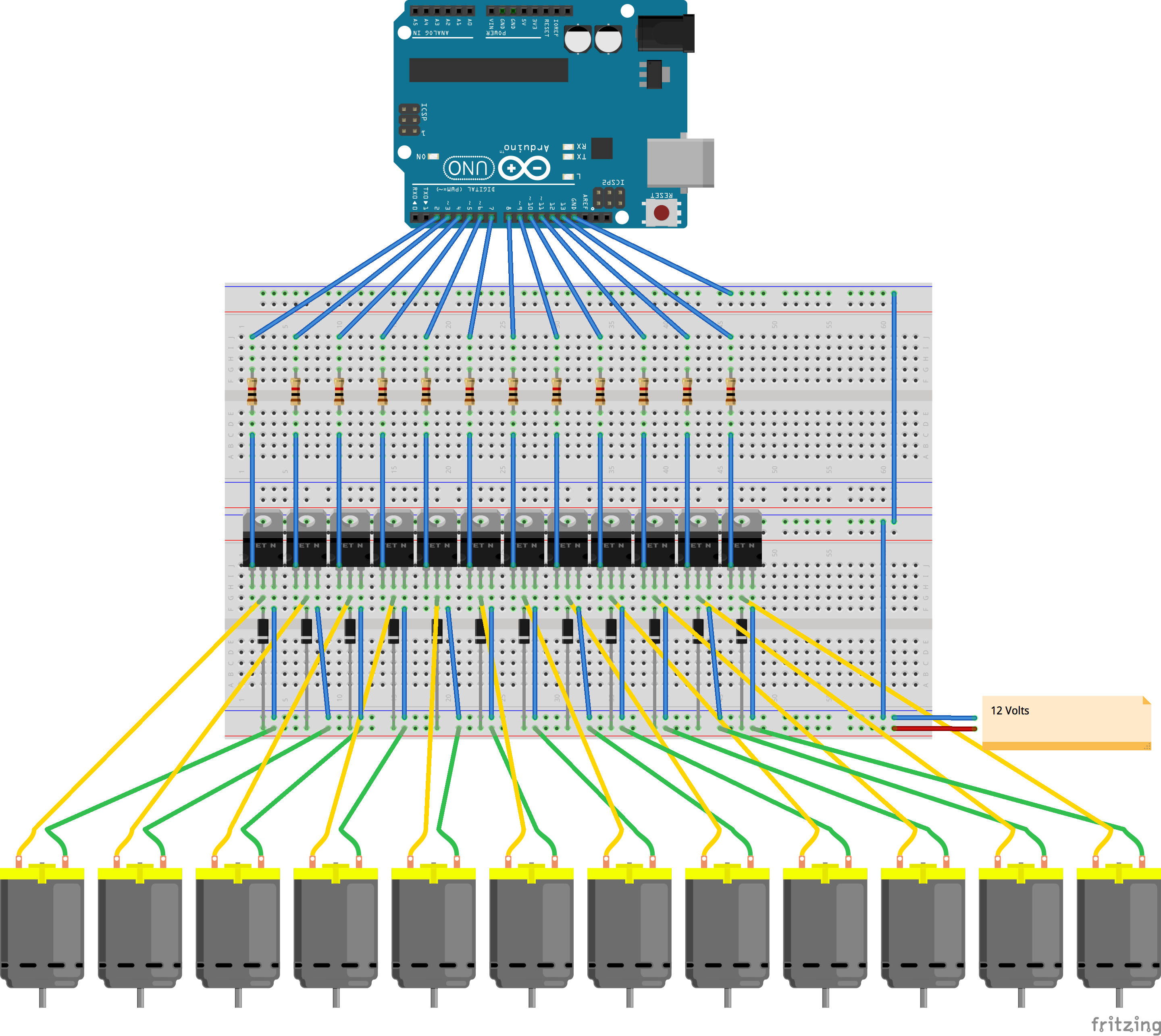
The installation is controlled by an Arduino board. Build your own array of pumps with the circuit diagram and the code example attached.
Find the code here:
SoftBarrierReef_simple
End-Presentation





 This and some specific research done in this field led us to a lot of different ideas. Including public transportation shelters with dynamic roofs reacting on light and rain or the design of specialized roofs in concert halls to improve the acoustics.
Inspiration
This and some specific research done in this field led us to a lot of different ideas. Including public transportation shelters with dynamic roofs reacting on light and rain or the design of specialized roofs in concert halls to improve the acoustics.
Inspiration
{kind=link}
 Find the code here: SoftBarrierReef_simple
End-Presentation
Find the code here: SoftBarrierReef_simple
End-Presentation