7. October 2010
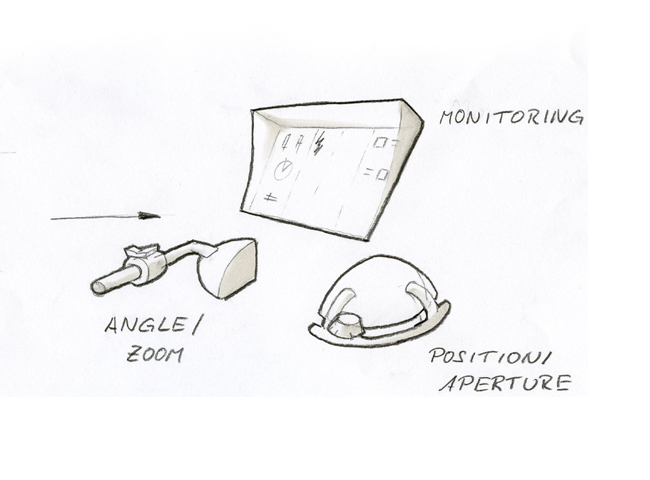
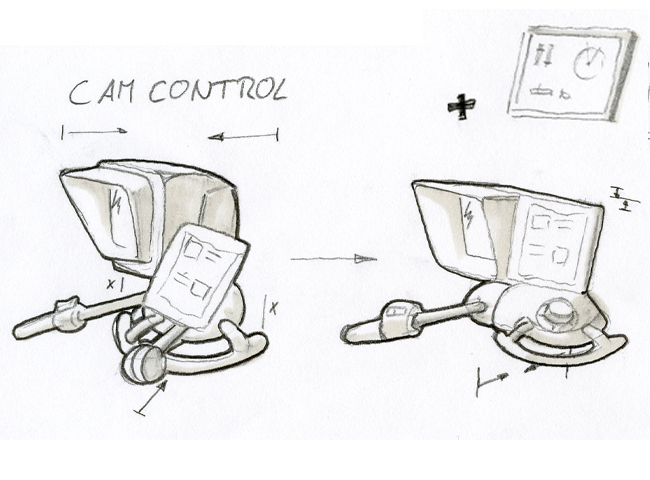
To map the common camera control to a ground control station I took the two camera systems and started to morph them. The first step was to disassemble the system and seperate parts that will take place in the drone or that will belong to the groundcontrol.
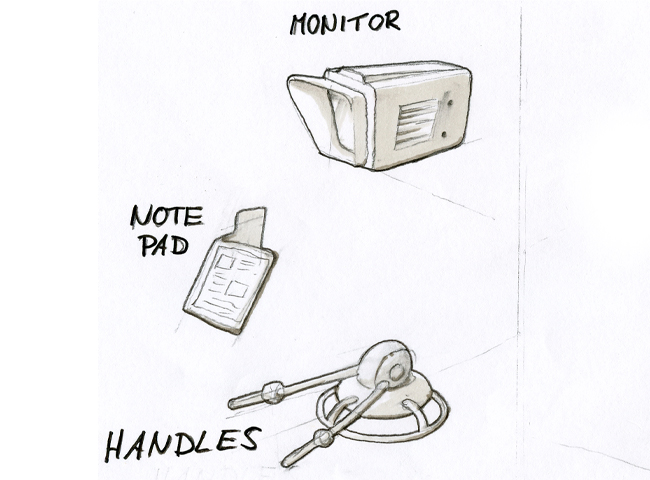
Then I reassambled the parts as a first step towards a new system.
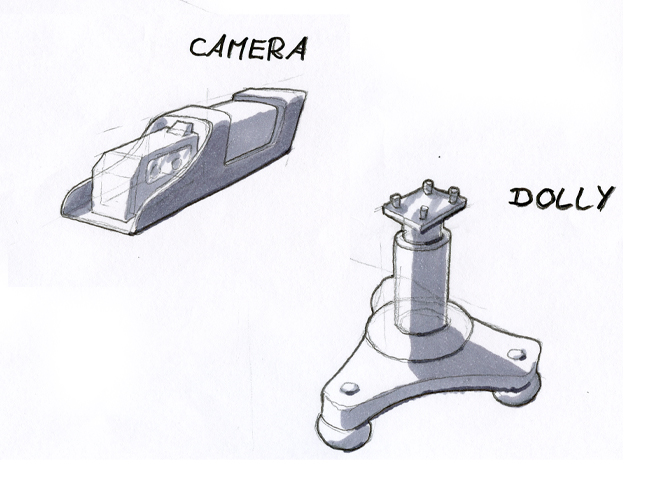
Further on I morphed the parts to fit with additional features that are nessecary because of the remoted control.
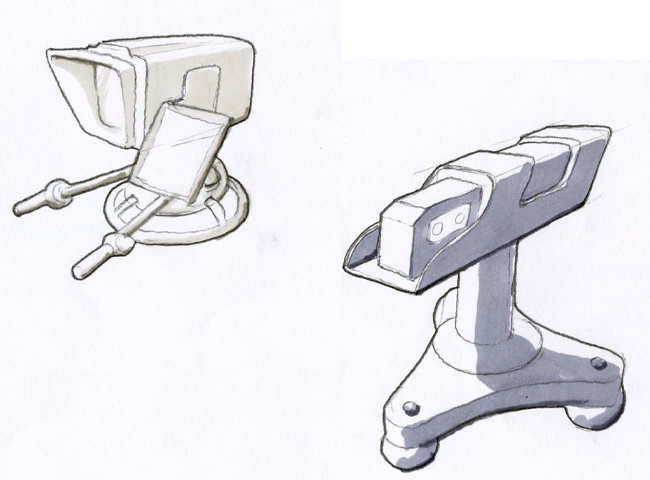
 The result is a first GCS.
The result is a first GCS.
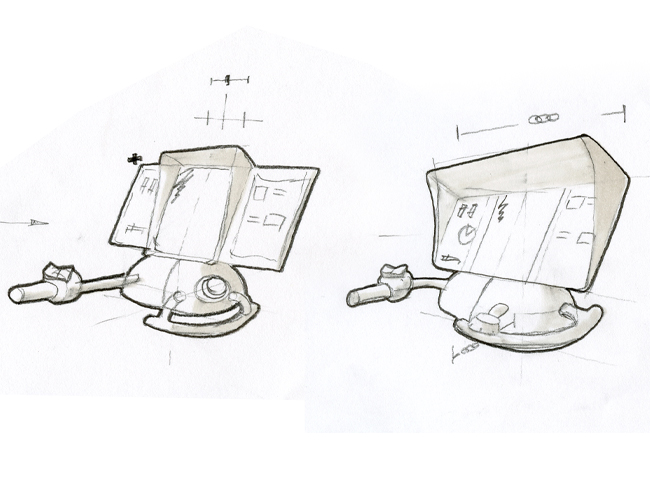
To fit the control handles in the new enviroment I disassambled it again. The next step will be a mophing for each part, so those can be optimised.