GPS-Code
GPS-Code
This example shows how to use the GPS, it just prints the GPS-Data to the serialport. The GPS-Data will be captures with the second serialport. The example uses the TinyGPS Library. I just made a wrapperclass 'GpsWrapper' around the library to simplify the access to the GPS-Data. Small Class Docu 'GpsWrapper'bool start(HardwareSerial* serialPort,int baudRate)
To start the GPS-Communication call this function with the serialPort where the GPS is connected + the baudrate
bool isValid()
Returns if the data from the GPS is valid
long latitude()
float latitudef()
Returns the latitude as long or as float value.
long longitude()
float longitudef()
Returns the longitued as long or as float value.
float altitude()
Returns the current height over see as long or as float value.
float course()
Returns the direction of movement in degrees
float speedKmph()
Returns the current speed
float distance(float lat1, float long1, float lat2, float long2, float unitsPerMeter)
Returns the distance from to locations
float angle(float lat1, float long1, float lat2, float long2)
Returns the angle between to locations
Setup
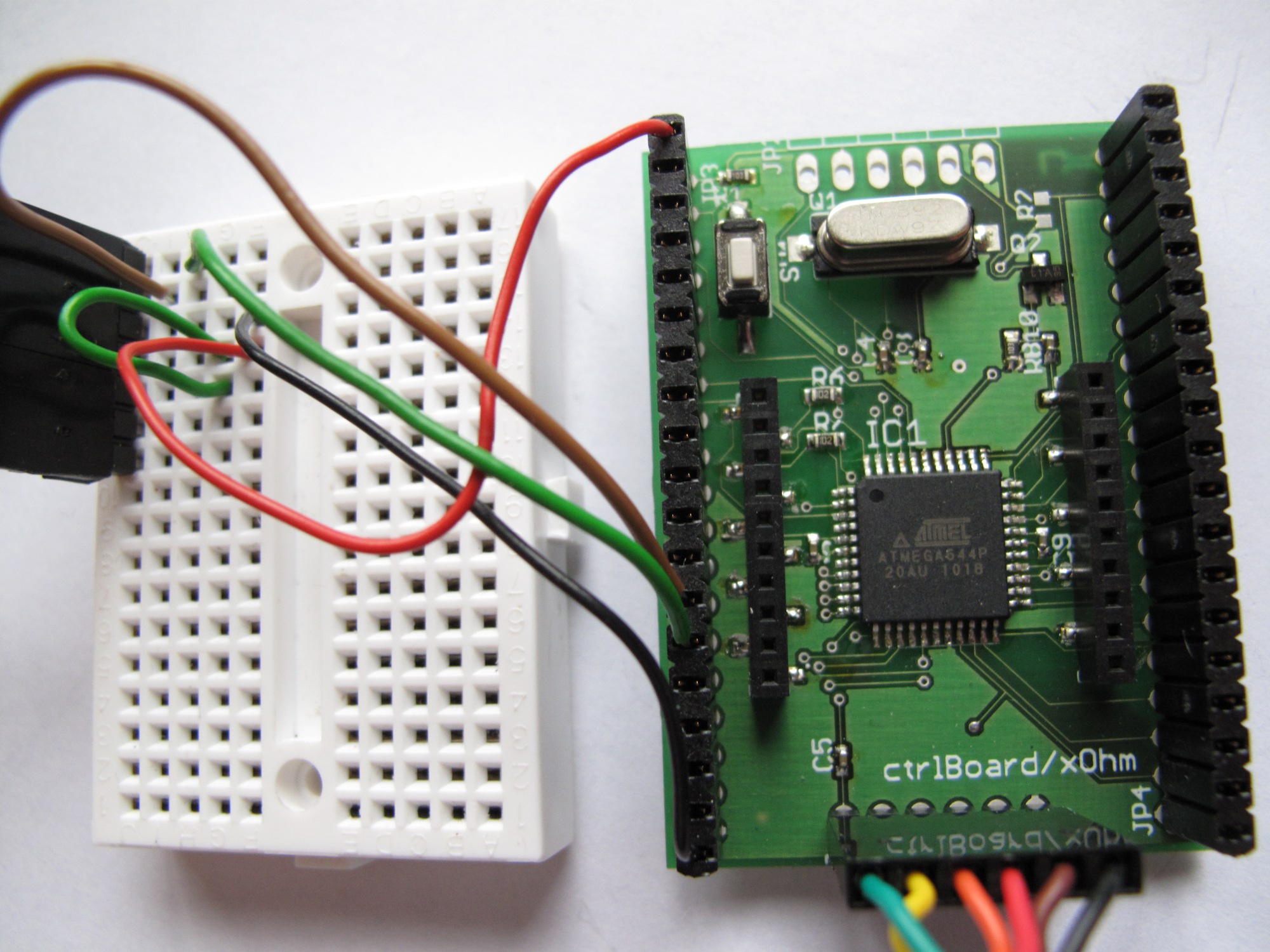
Connections:
Type Controller GPS Color
VCC,3.3v VCC 4,5 (VDD,VBAT) Red
GND GND 3 (GND) Black
Serial RX1(D10) 2 (TXD) Brown
Serial TX1 (D11) 1 (RXD) Green
#include <TinyGPS.h>
#include "gpsWrapper.h"
GpsWrapper gpsWrapper;
unsigned long start = millis();
void setup()
{
// output serial
Serial.begin(9600);
Serial.println("-----------------");
Serial.println("Start gps reading");
Serial.println("-----------------");
// gps serial
gpsWrapper.start(&Serial1,9600);
}
void loop()
{
gpsWrapper.parseGps();
if(millis() - start > 3000)
{ // output data
start = millis();
// print out status
gpsWrapper.dump(&Serial);
}
}
If you run the code, be aware that you should have straight view to the sky. Also it will take around 30-60sec till the gps delivers valid data, if you do a coldstart.
Download Source